
写文章




- @zyc18700766982
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
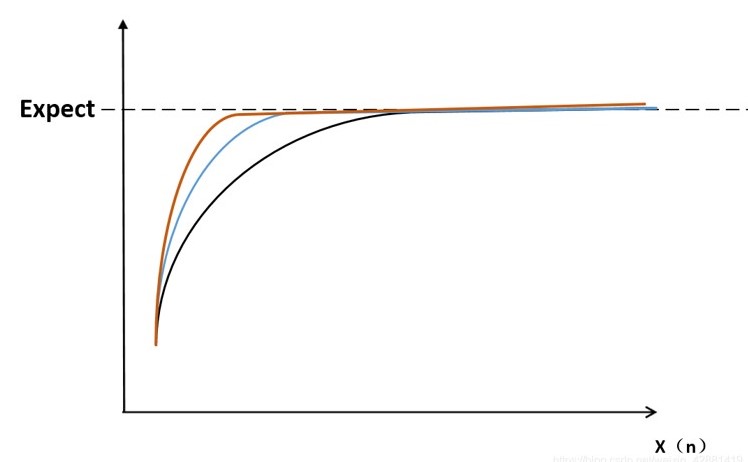
数字PI调节器_位置式/增量式_区别原理
PI调节器是电力拖动自动控制系统中最常用的一种控制器数字控制器需要对模拟控制器进行离散化。
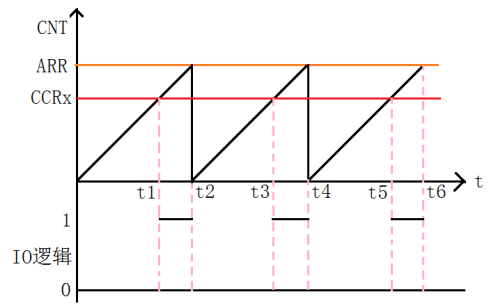
TIM_OCMode_PWM1与TIM_OCMode_PWM2的区别
TIMx_CNT>TIMx_CCRn时,输出无效电平。可以是TIM_OCPolarity_High(高电平)或者TIM_OCPolarity_Low(低电平)TIMx_CNT>TIMx_CCRn时,输出有效电平。有效电平由TIM_OCInitStructure.TIM_OCPolarity决定。TIM_OCMode_PWM1 PWM模式1。TIMx_CNT
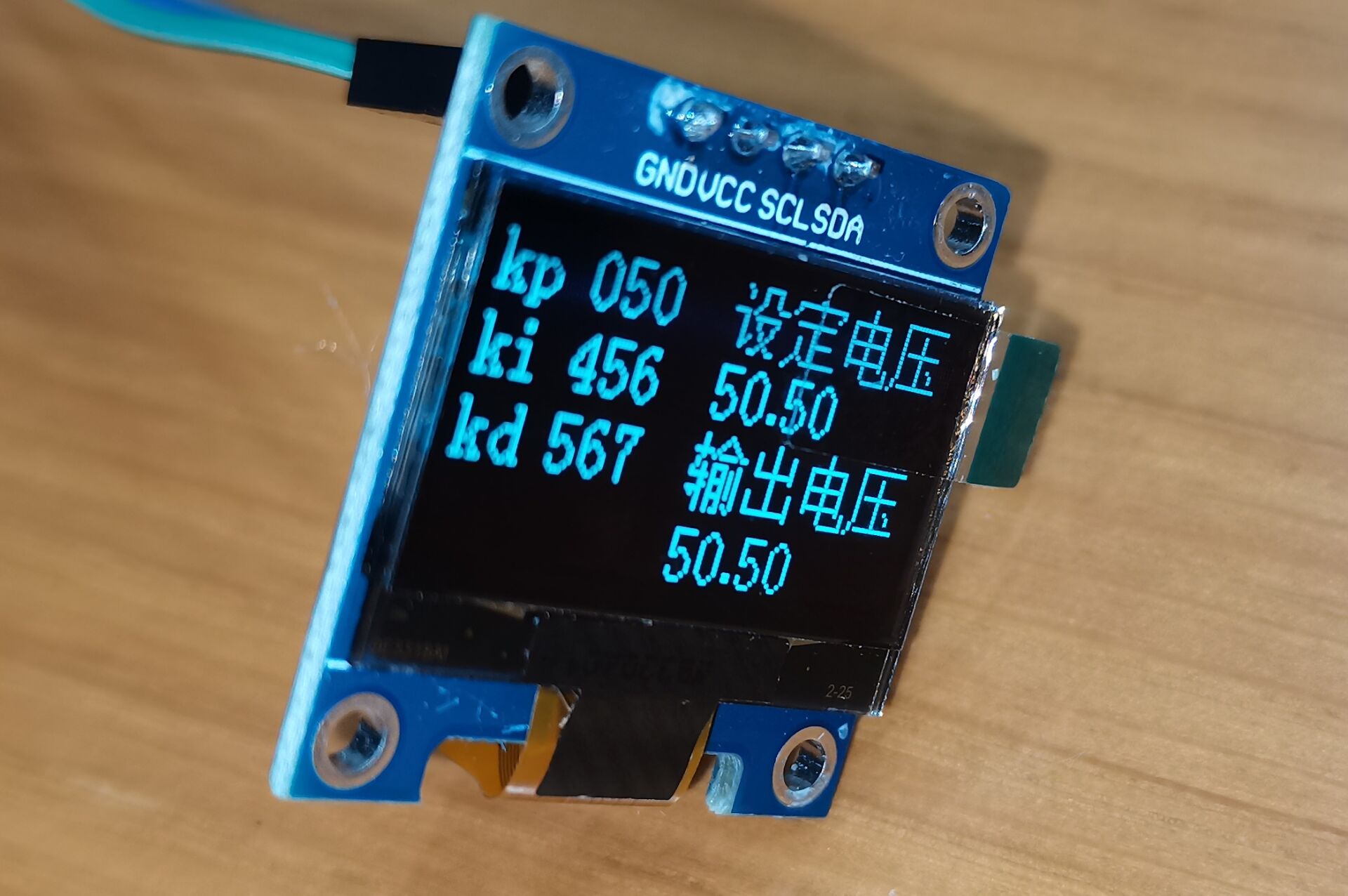
stm32 0.96OLED iic 局部清屏
stm32 0.96OLED iic 局部清屏
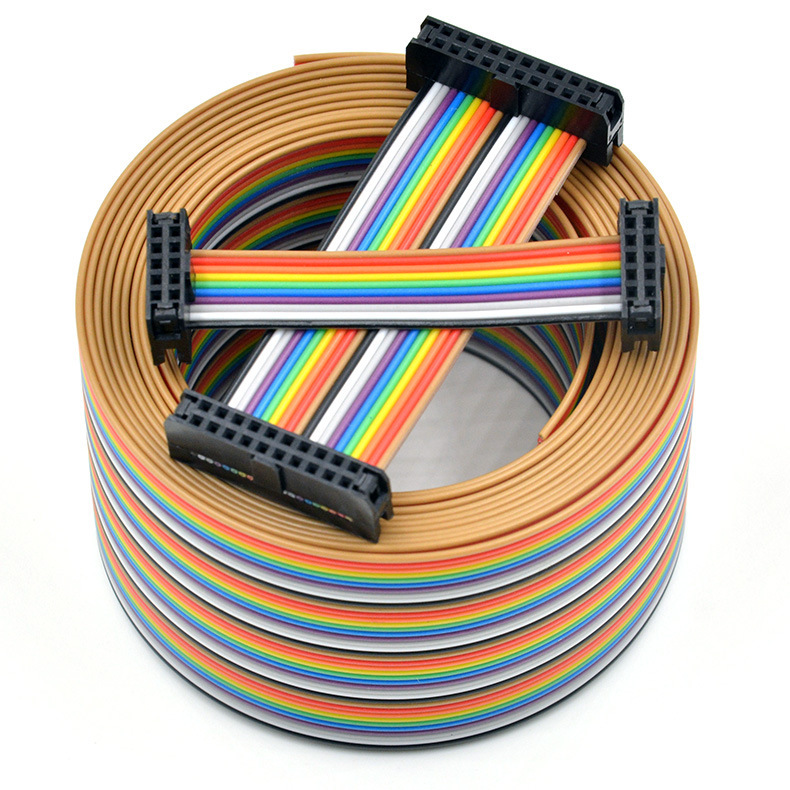
PCB常用端子/排线
告别杜邦线
simulink&veristand&labview联合仿真——模型导入&搭建人机界面
手把手教学simulink&veristand&labview联合仿真,基于仿真模型的labview人机交互界面

到底了