
写文章




- @zhangxr2020
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
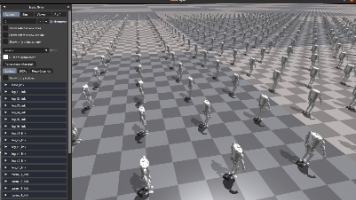
乐聚机器人开源程序kuavo-rl-opensource/kuavo-robot-train配置流程
我的环境:ubuntu20.04 + nvidia驱动570.133.07 + cuda12.1。
win10安装ubuntu20.04双系统(个人记录篇)
安装双系统ubuntu20.04
ubuntu22.04 “启动对话失败”&桌面文件和文件夹图标丢失解决
ubuntu22.04“启动对话失败”& 桌面文件和文件夹图标丢失解决
乐聚机器人开源程序kuavo-rl-opensource/kuavo-robot-train配置流程
我的环境:ubuntu20.04 + nvidia驱动570.133.07 + cuda12.1。
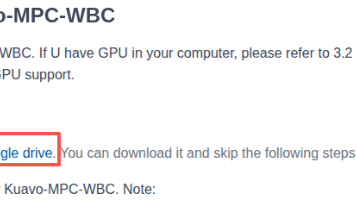
乐聚机器人开源程序kuavo-rl-opensource/kuavo-robot-deploy配置流程(成功编译但未成功运行)
deploy是为了在仿真环境中部署训练好的模型,先构建docker环境,然后在docker环境中部署总体部署流程参考官网的readme:建议仔细阅读每一部分的reademe和附录11了解docker文件夹下各文件的作用。
到底了