- @yunddun
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
传感器种类
esp32开发板和手机建立TCP通讯时,发送的信息有以下不同编码方式比如我要发送数字1 和 2不管是Unicode还是UTF-8编码,发送到板子,经过解码出来的1或者2 都是字符串的形式(比如:我要判断我要发送的是1还是2,需要用if判断接收到的信息解码后是否==‘1’或者‘2’字符串)如图解码与编码:假设:我以UTF-8编码方式发送1,如果直接把data打印出来,那么发送1,data就是 b’1
采样时间(adc中断时间)10k.定步长求解器-离散求解器。

加速度不仅包含载体运动的加速度,也包括地球的重力加速度,所以也称为比力计。

24C02简介24c02地址介绍24C02是一个2K位串行CMOS 的EEPROM,内部含有256个8位字节。与 400KHz I2C 总线兼容1.8 到 6.0 伏工作电压范围低功耗 CMOS 技术写保护功能 当 WP 为高电平时进入写保护状态页写缓冲器自定时擦写周期1,000,000 编程/擦除周期可保存数据 100 年8 脚 DIP SOIC 或 TSSOP 封装const u8 TEXT_
pwm学习内容(这方面知识个人觉得直接上图配合文字更好理解)
本文分为几个部分:1.编码器2.定时器输入捕获(把定时器初始化为编码器模式)3.pid闭环控速度编码器1.概述2.原理四倍频技术

对定时器周期公式的理解:T=(arr+1)(PSC+1)/Tck其中TCK为时钟频率,PSC为时钟预分频系数,arr为自动重装载值。f=Tck/(psc+1)(arr+1)Tck/(psc+1)即为时钟频率,1/f为机器周期,乘以(arr+1)即可得出定时器周期。例子:TCK=72MHZ,psc=71.时钟周期=1us.(arr+1)值为多少,定时器周期就为多少毫秒。1.TIMx(1-8),在库设
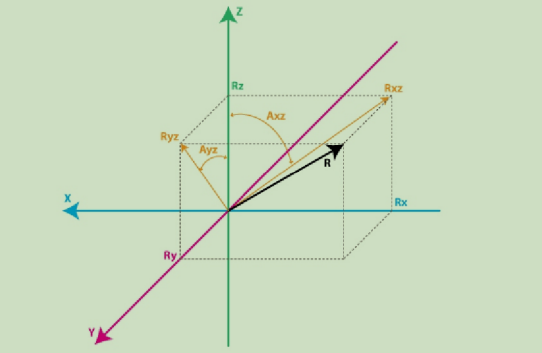
全球首例整合性6轴运动处理组件3轴陀螺仪+3轴加速度计IIC接口,可用于扩展外部传感器数据格式:旋转矩阵、四元数(quaternion)、欧拉角格式体积小无人机传感器MPU6050:3轴陀螺仪+3轴加速度(姿态)HMC5883:3轴数字罗盘(精确方向控制)MS5611:气压计(高度计)Pitch:俯仰角(抬头低头)Roll:滚转角(翻身)Yaw:偏航角(转弯)三个角度组合,可唯一确定一个姿态...
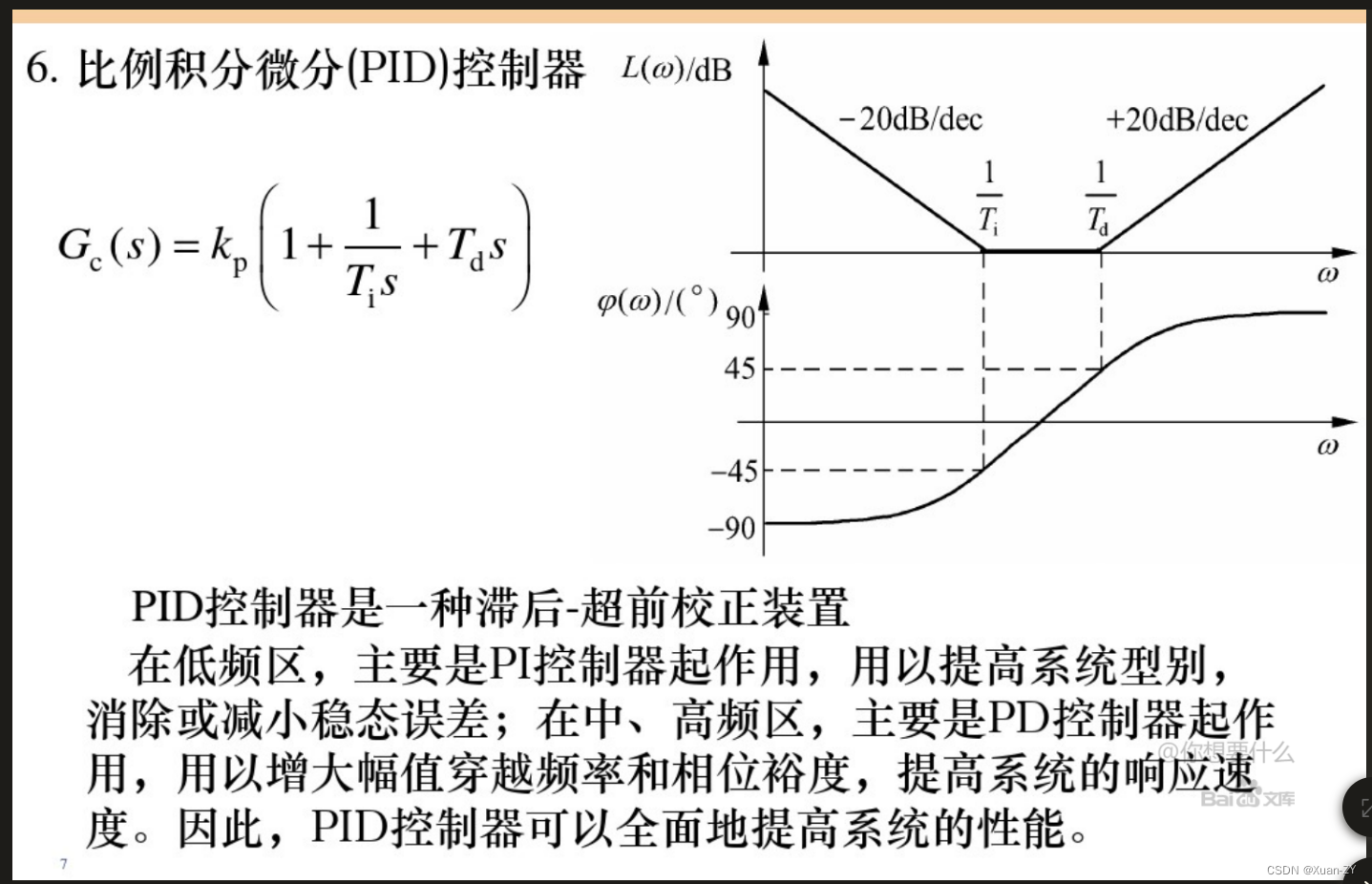
在,主要是PI控制器起作用,用以提高系统型别消除或减小稳态误差;在,主要是PD控制器起作用,用以增大幅值穿越频率和相位裕度,提高系统的响应速度。因此,PID控制器可以全面地提高系统的性能。