- @xhamigua
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
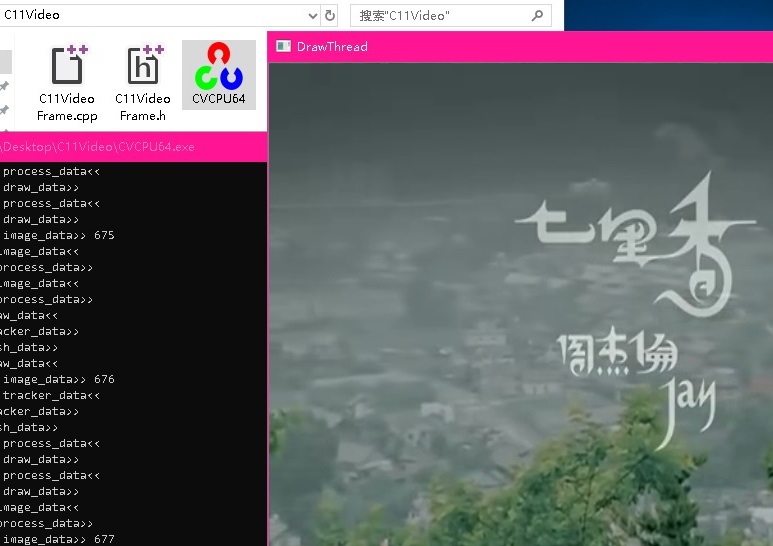
相机检测用到的异步多线程处理(1)这里为了好说明问题就不用FFMPEG 还是用VideoCapture好描述,保证代码足够简单易懂以下都以opencv用主.通常在目标检测分析处理中大致思路是下面这样的://视频模拟cameravoid testCPUvideo(const char* name){cv::VideoCapture vcap;cv::Mat fps_curr;vcap.open(na
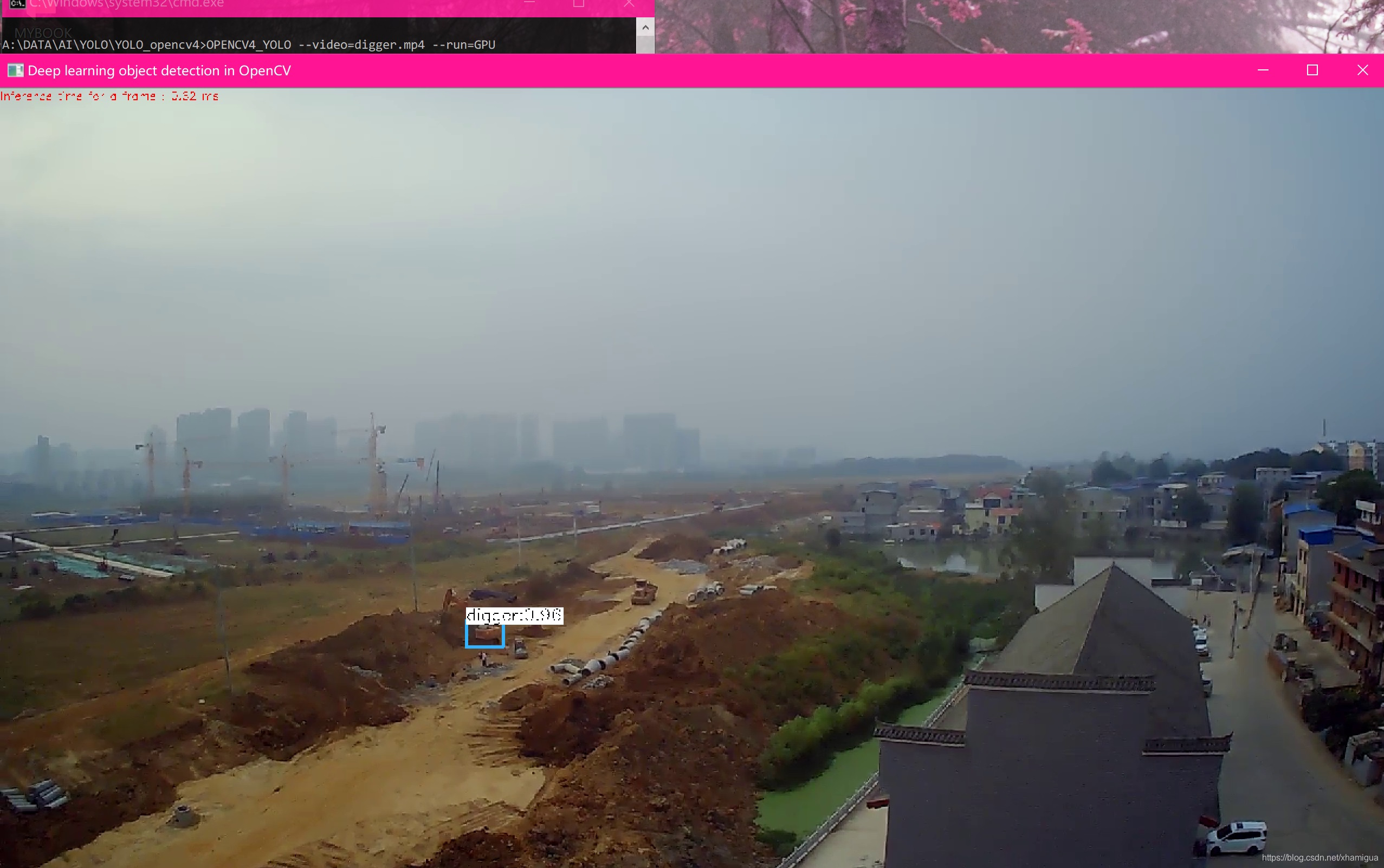
深度学习YOLO的应用实战提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加例如:第一章 Python 机器学习入门之pandas的使用提示:写完文章后,目录可以自动生成,如何生成可参考右边的帮助文档文章目录深度学习YOLO的应用实战前言一、pandas是什么?二、使用步骤1.引入库2.读入数据总结前言提示:这里可以添加本文要记录的大概内容:例如:随着人工智能的不断发展,机器学习这门
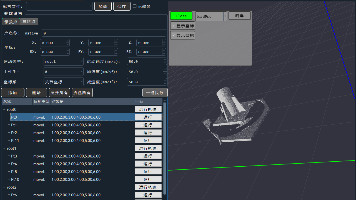
robotEMU机器人焊接仿真工具3.0提供完整的焊接仿真流程:支持通过相机点位扫描建模,可单点或连续扫描生成焊点数据;生成的识别焊点与建模动作关联,支持显示所有焊点;焊接步骤创建功能包含过渡点、起弧、收弧等操作类型,可组合识别焊点和补充点位;最后通过一键执行功能自动完成所有预设焊接步骤。系统实现了从焊点识别到焊接操作的全流程自动化仿真。
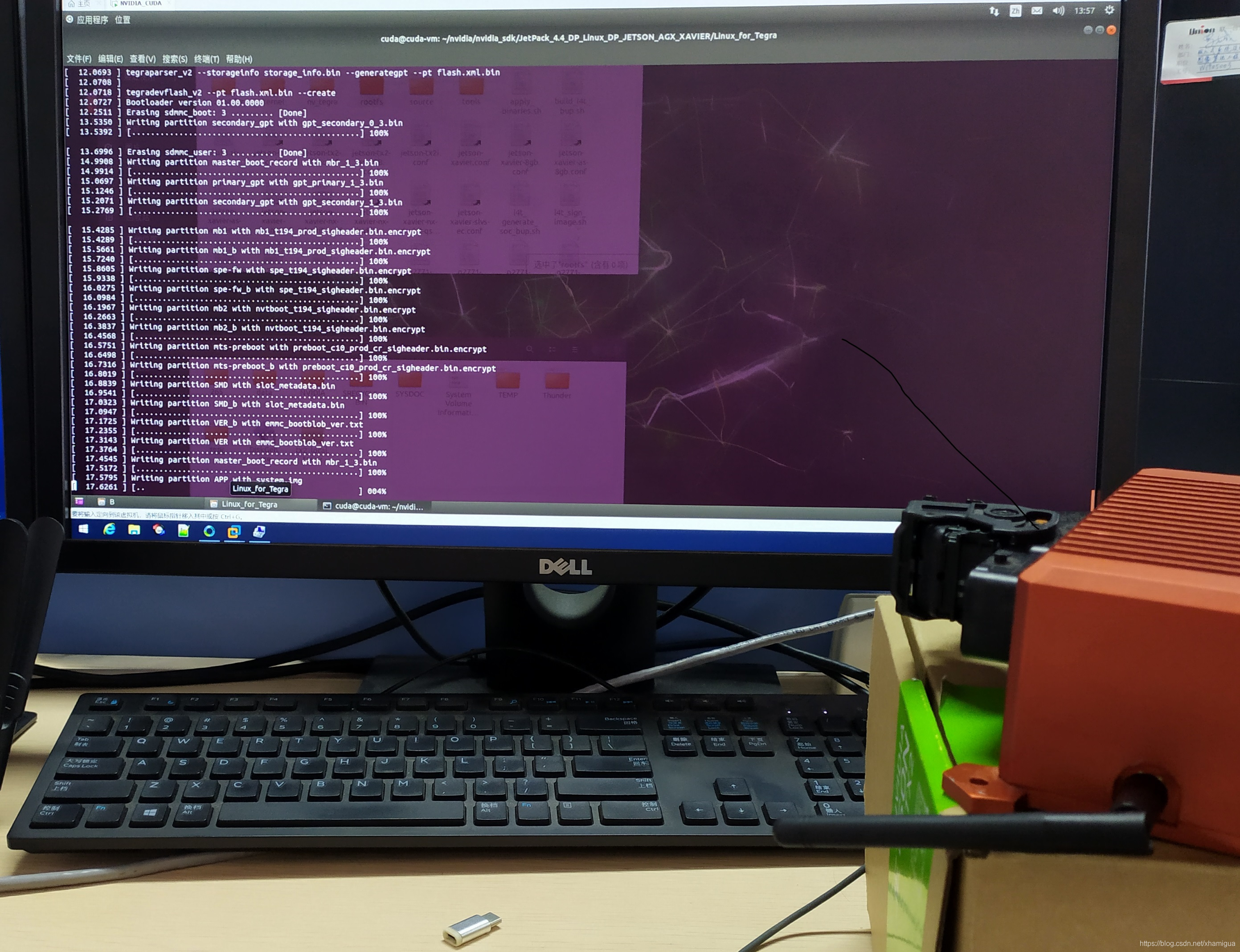
在填NVIDIA Jetson系列开发版时难免有对系统环境造成严重污染的情况,这时就要重新刷机了。拿起Jetson4下载刷机镜像解压等等,安装依赖漫长的操作耗费一天就过去了。下面接上篇在刷完NVIDIA的主机器(ubuntu18.04安装JP4的那台)中分析一下 Jetson4.4 下flash.sh 文件,不难发现其实NVIDIA已经把恢复 备份都做好了。如下可以备份这个目录tar打包(不过我觉