
写文章




- @weixin_73673952
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
黄山派小智平衡车【雏形】
○如上图:静止倾斜时通过x轴测得的加速度与z轴测得的加速度值的反正切函数即可计算出对应的俯仰角度(pitch),翻滚角(roll)同理。●Angle(输出角度) = Angle _g(角速度角) + a * (Angle_a(加速度角) - Angle_g)●Angle(输出角度) = Angle _g(角速度角) + a * (Angle_a(加速度角) - Angle_g)●消除长期积累的误差

黄山派小智自定义待机界面(二)
小智自定义动态背景待机界面。
黄山派小智自定义待机界面(一)
小智自定义待机界面
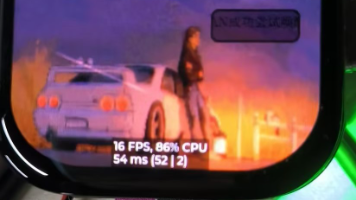
黄山派小智 LVGL显示性能分析
显示性能参数显示分析。
思澈科技 SF32小智源码构建-基础自定义(MCP、魔塔社区)
魔塔社区MCP服务应用

思澈科技 SF32小智源码构建-基础自定义(静态图片、动态图片替换)
前置博文:https://blog.csdn.net/weixin_73673952/article/details/151315335?spm=1011.2415.3001.5331官方参考文档:https://docs.sifli.com/projects/xiaozhi/custom/

到底了