
写文章




- @weixin_65089713
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
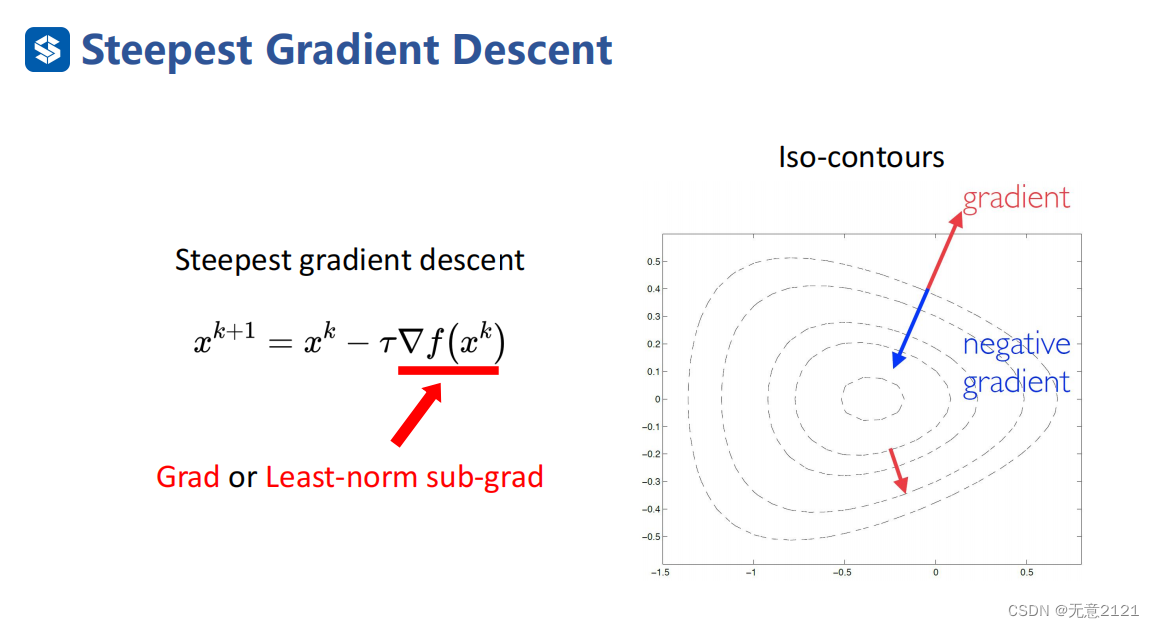
机器人中的数值优化之最速下降法
梯度方向是函数上升最快的方向,而负梯度方向则是函数下降最快的方向,因此。如果采用衰减步长迭代,可以保证收敛,但是随着步长越来越短,收敛越来越慢。如果采用恒定步长迭代,将导致不停的震荡,始终无法收敛。非精确线搜索:我们不希望再求解子优化问题,也就是。前面我们讨论了迭代方向如何选择,现在讨论。,对于条件数,不清楚的读者可以参考。而这里也采用了一种二分的方法,当。这里我们还需要考虑条件数的问题,对于次梯
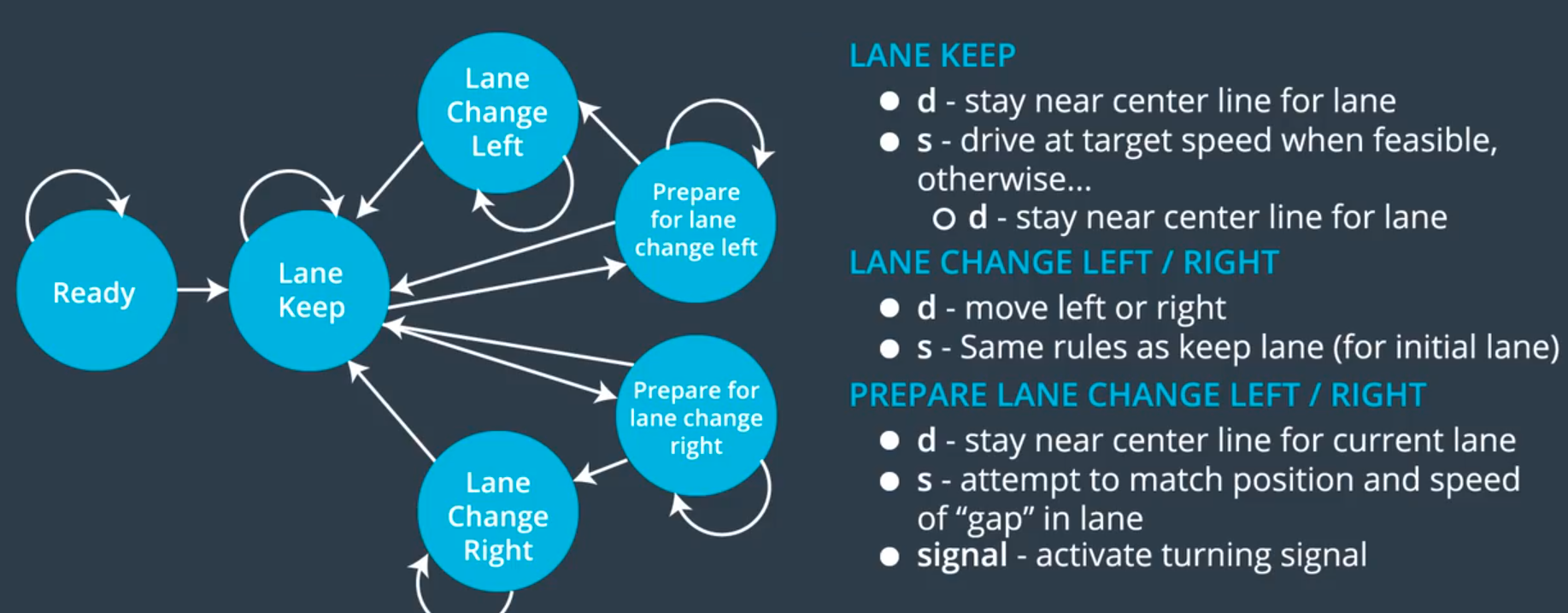
自动驾驶预测与决策规划(有限状态机)
1 有限状态机的介绍(1)在硬件角度看,状态机由状态寄存器和组合逻辑电路构成,能够根据控制信号按照预先设定的状态进行状态转移。(2)因为状态机是基于有限的离散状态,所以状态机也称为有限状态机,简写为FSM(Finite State Machine)(3)有限状态机是一个简单的抽象反应系统,它只针对特定的外界激励产生数量有限的响应其核心思想是,通过有限的状态描述定义,组合产生大量的复杂的逻辑行为..
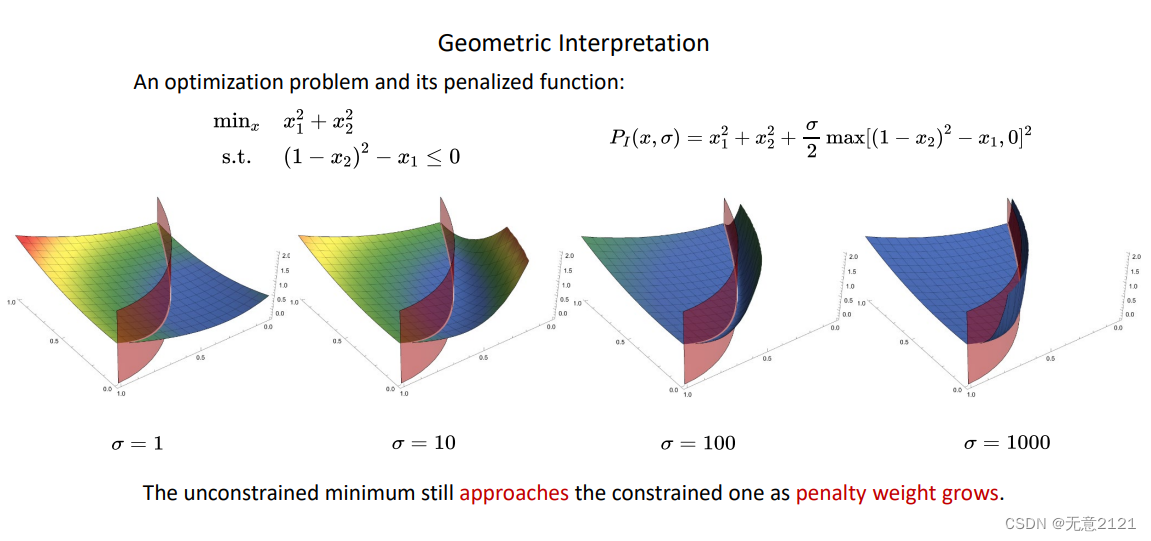
机器人中的数值优化之罚函数法
由于L1-罚函数非光滑,因此无约束优化问题P的收敛速度无法保证,这实际上就相当于用牺牲收敛速度的方式来换取优化问题P的精确最优解。,如在1e-2~1e-3之间可接受。约束违背量不要求特别小时可采用。除了直接一步到位,还可以。
到底了