- @weixin_53805189
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
添加的注释仅供参考,博主个人学习使用。如有侵权,请联系我删除!!
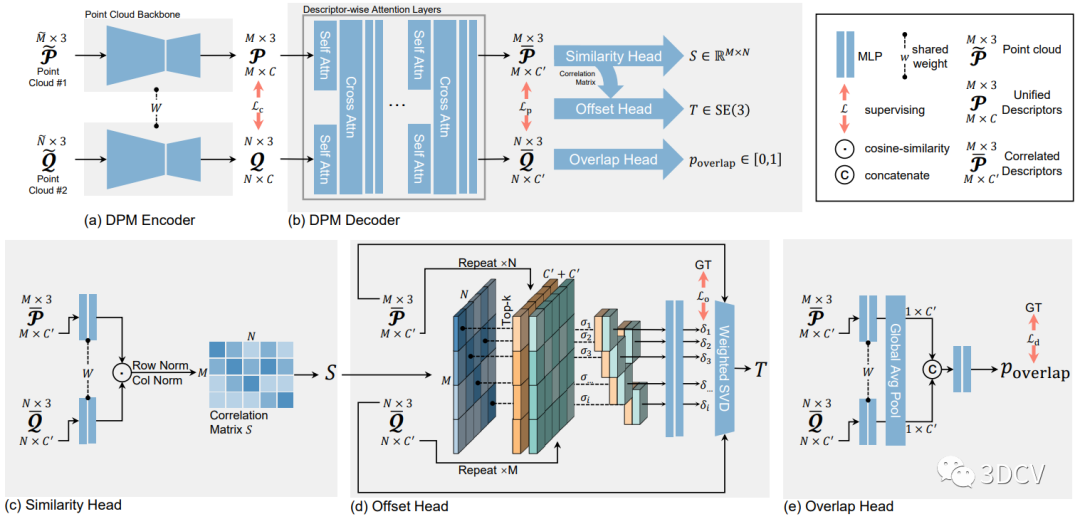
我们提出了一种基于深度学习的LiDAR SLAM框架,称为DeepPointMap(DPM)。该框架包括两个神经网络:DPM编码器和DPM解码器。与其他神经描述符方法不同的是,DPM描述符可以统一地用于SLAM任务的多个子任务,具有出色的定位精度、内存效率、地图保真度和实时处理能力。DeepPointMap在定位精度、地图重建质量和内存消耗方面取得了新的最优结果。此外,该框架还在多智能体协作SLA
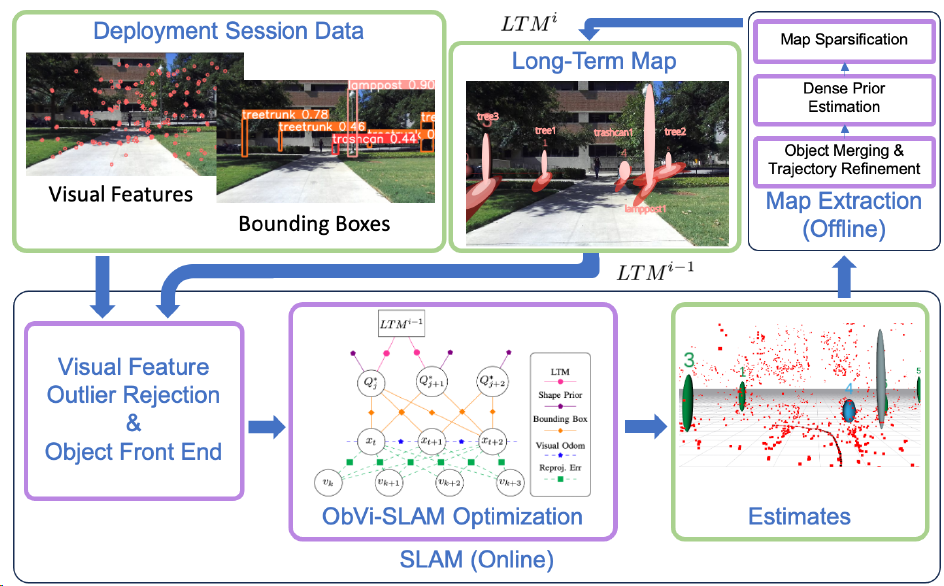
这篇论文提出了Photo-SLAM,一个创新的框架,解决了现有方法在可扩展性和计算资源限制方面的问题,同时实现了精确的定位和在线的逼真地图构建。该系统维护了一个“超原语地图”,由存储ORB特征的点云、旋转、缩放、密度和球谐系数组成。通过使用因子图求解器优化跟踪,并通过计算原始图像与渲染图像之间的损失来学习相应的映射。虽然引入了3D高斯散射渲染器来降低视图重建成本,但它并不能在单目场景下实现高保真的

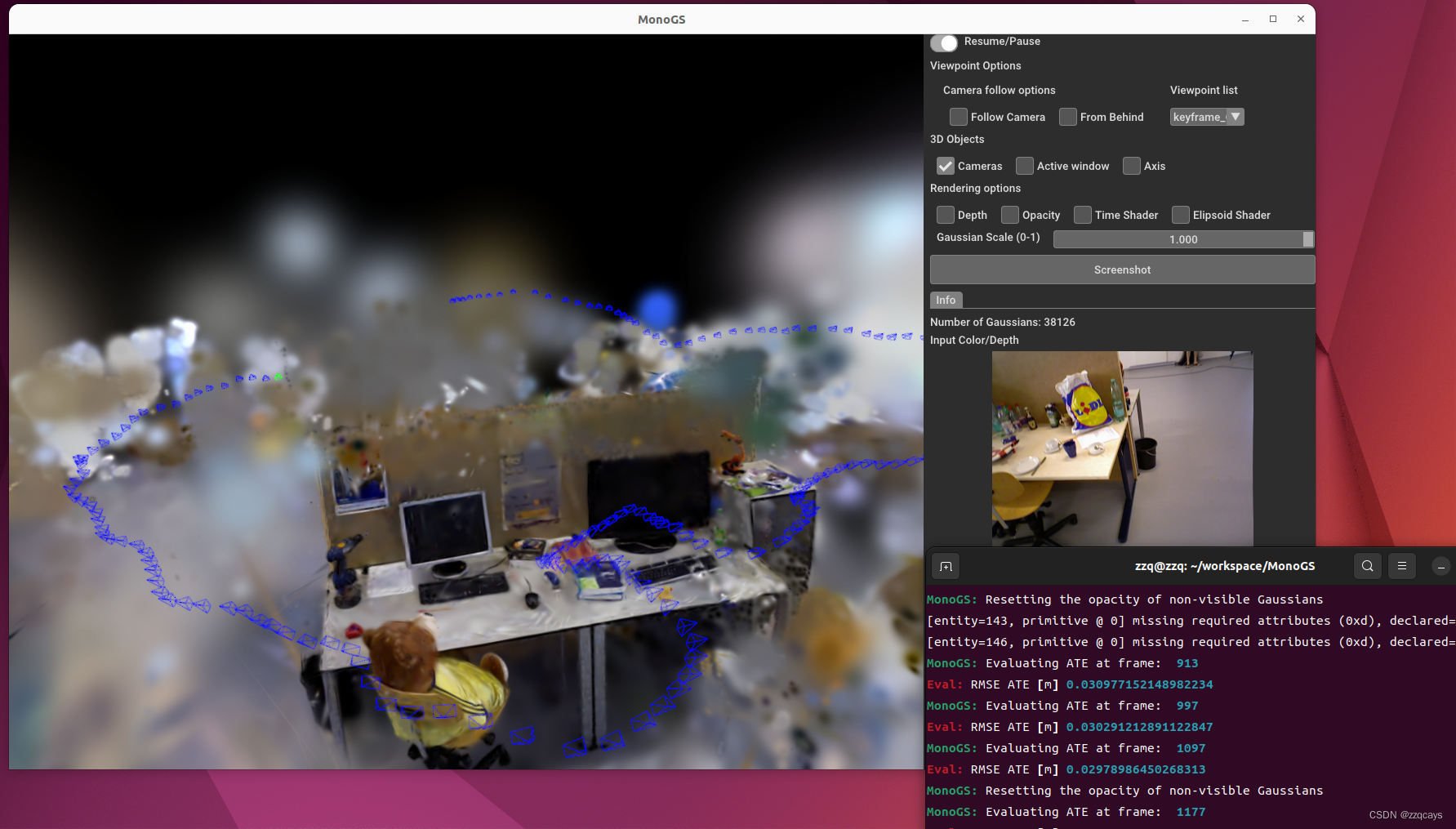
自己安了一个双系统因为在wsl2上实验失败了(问题1,2,3,4,5)在实验室的服务器上实验失败了(问题:无法可视化)最后安装双系统然后根据上面的做法做下来就成功了注意!!因为MonoGS比较新,所以很多出现的问题没办法在网络上找到可以尝试在论文开源的代码下面,找到issue,然后看看里面有没有跟你一样的问题,如果找不到问题所在,可以直接在里面发布自己的问题,问作者,作者会回答的!!!最后的配置:
0这部分指南内容是从 ROS(1)导航文档中的“使用 tf 设置机器人”教程中改编而来。这个例子描述了一个简单的机器人,它有一个移动底座,底座顶部安装有一个单一的激光传感器。机器人有两个定义好的坐标系:一个对应于机器人移动底座的中心点,另一个对应于安装在底座顶部的激光的中心点。我们将附着在移动底座上的坐标系称为 base_link,将附着在激光上的坐标系称为 base_laser。需要注意的是,在