
写文章




- @weixin_51962439
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
基于Python的终端快速SSH连接工具
(第一次使用需要修改示例用户名和固定网段)(后期使用不用每次修改)示例用户名为abc,改为自己想连接的设备用户名,比如我想要远程的用户名为hhh按1,输入新用户名,可以看到连接命令里的abc已经变为了hhh按2修改固定网段,例如我的固定网段为192.168.77.XX。

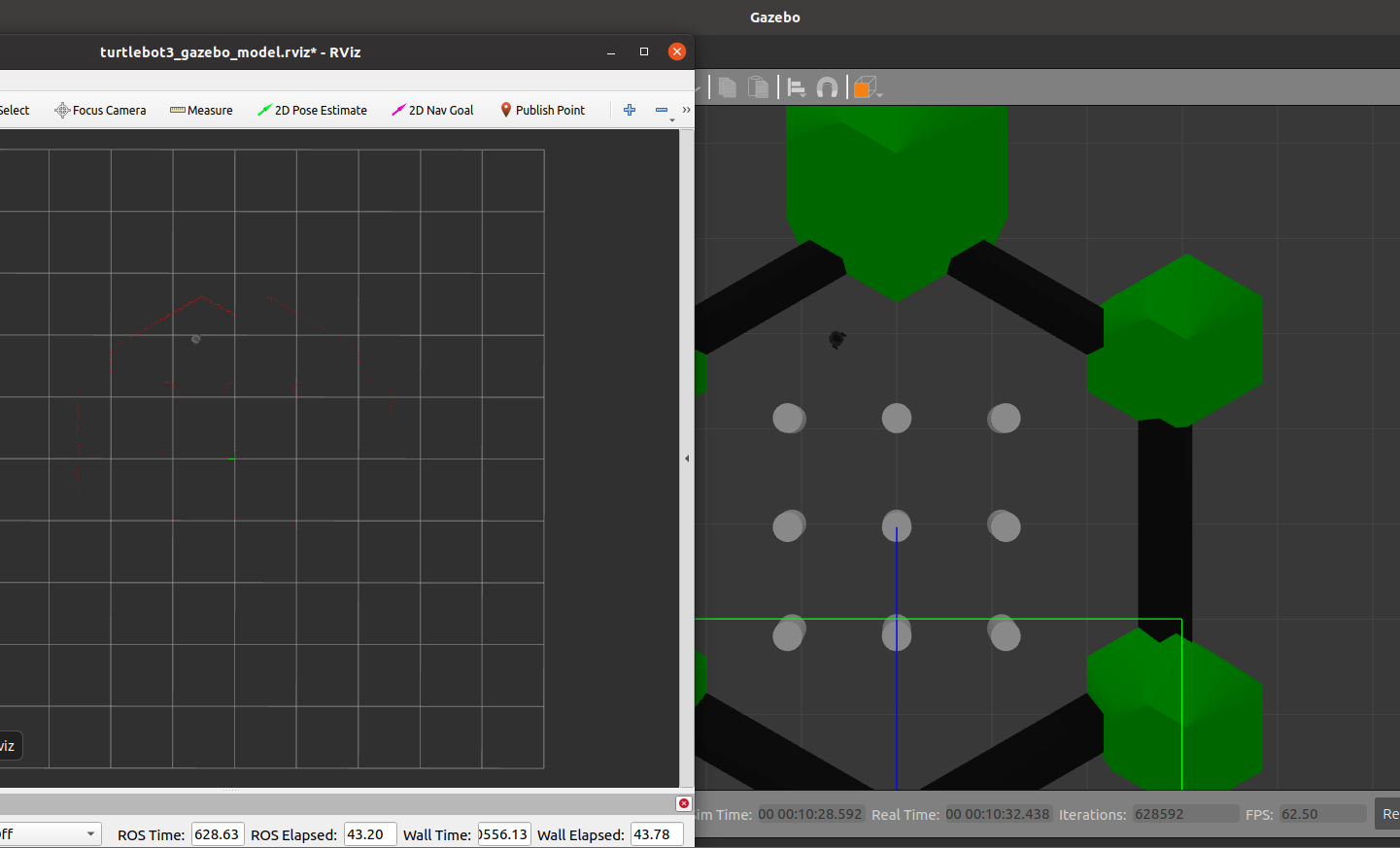
Turtlebot3模拟仿真(参考书《ROS机器人开发实用案例分析》卡罗尔·费尔柴尔德, 托马斯·L.哈曼 机械工业出版社, 2020年4月)
说明:3个终端分别运行:环境,gazebo中自主导航的机器人,rviz雷达显示——每个终端都要设置环境变量source devel/setup.bash和设置模型export TURTLEBOT3_MODEL=burger。(2)自主导航,Ctrl+C终止键盘控制进程,关闭终端窗口,打开新界面窗口(终端2)(终端1保留,其实就是多物体的环境保留,把操作机器人移动的终端关掉)可以把之前的2个终端都关
到底了