- @weixin_48005998
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
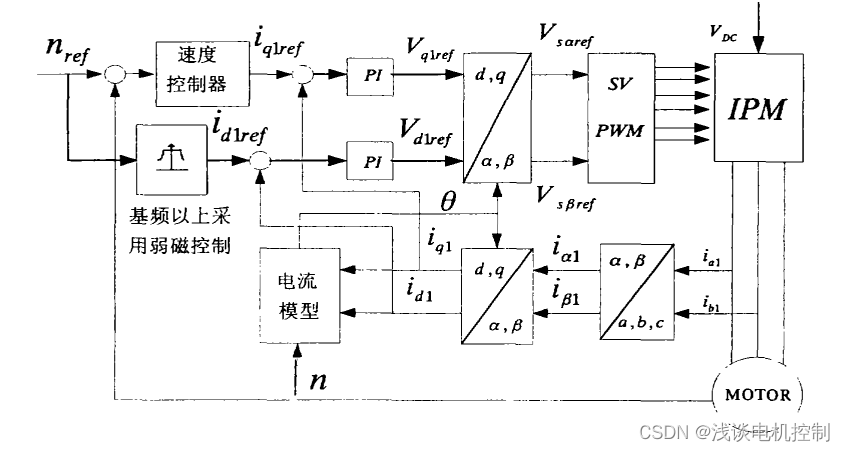
对异步电机矢量控制作一个系统的总结,通过总结对异步电机FOC有了更深的理解。
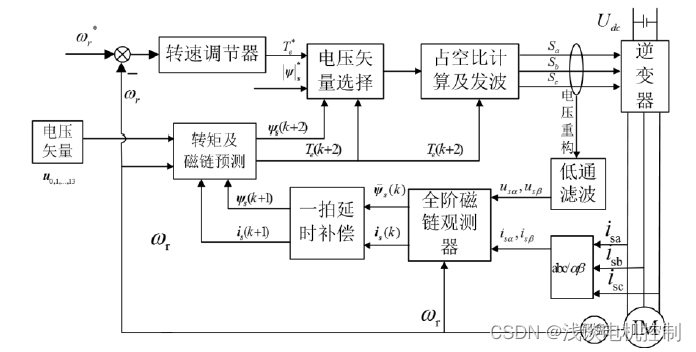
导读:异步电机直接矢量控制需要通过磁链观测器来获取同步角,用于控制过程中的坐标变换。同时,磁链观测器输出的估计磁链用于磁链PI调节器闭环控制。所以磁链观测器在矢量控制中显得尤为重要。
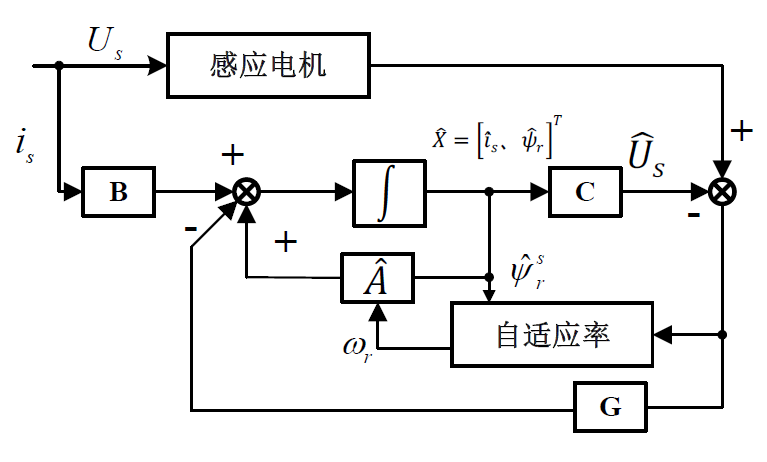
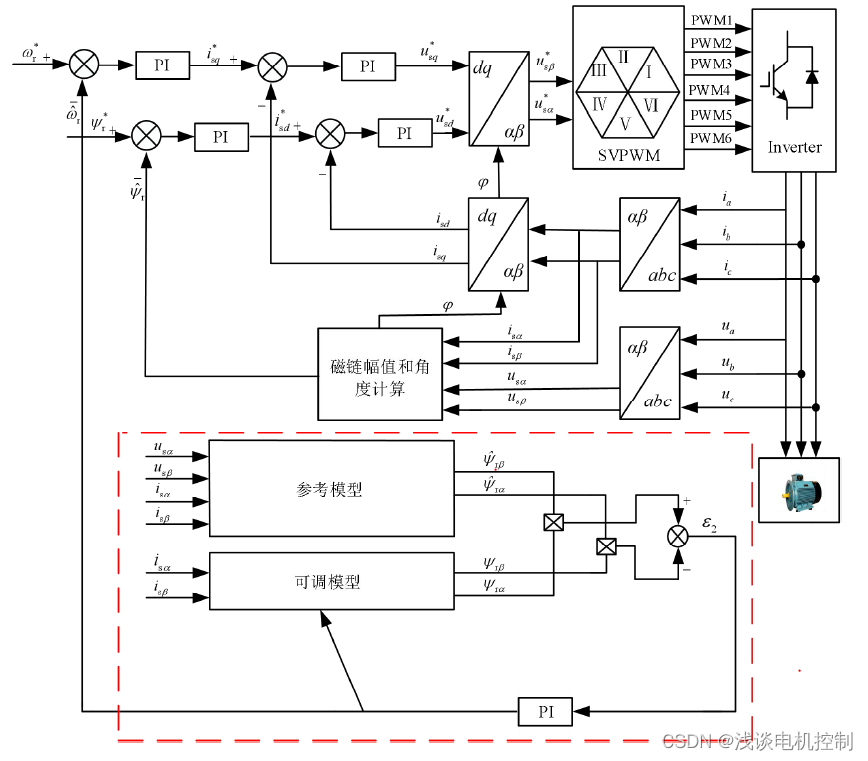
导读:上期文章介绍的磁链闭环、速度开环的异步电机无速度传感器的矢量控制,基于其存在的在启动时有一个较大的估计值且带载能力弱的问题,本期文章介绍一种模型参考自适应的速度估计方法(MARS)。
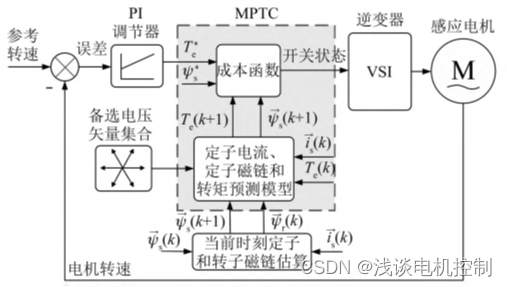
导读:本期文章主要介绍异步电机双矢量模型预测转矩控制。在一个控制周期内用零矢量和有效电压矢量合成最优电压矢量(占空比控制),可有效改善单矢量发波时的缺陷。需要文中的双矢量MPTC模型,可关注公众号:浅谈电机控制,获取(留下邮箱)。...
本期主要学习介绍模型预测控制(MPC, Model Predictive Control),主要分为四个部分,MPC基本原理、MPTC控制原理、仿真搭建和结果分析。文章仅代表自己所知所解,有理解错误的地方欢迎指正。如果想要模型预测转矩控制的仿真波形,关注公众号:浅谈电机控制,留下邮箱获取。
导读:本期主要介绍一下异步电机和永磁同步电机的区别,后面文章也会开始介绍永磁同步电机相关的控制算法。需要本文中搭建的仿真模型,关注微信公众号:浅谈电机控制,获取。
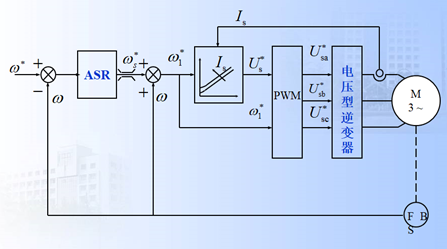
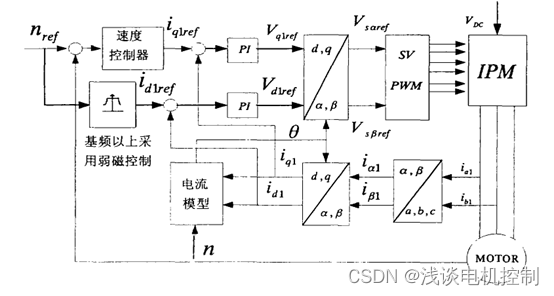
导读:本期对异步电机矢量控制的控制性能做个简单对比。发波的方式选SVPWM和滞环电流控制两种方式。首先对FOC做个简单分析,接着simulink建模,最后仿真波形分析。如果需要搭建好的模型(滞环和SPWM),关注微信公众号:浅谈电机控制,获取。留下邮箱即可,看到后就会发给你。一、工作原理矢量控制(FOC, Field Oriented Control)在转子磁场定向的前提下,将定子电流分解成励磁分
对异步电机矢量控制作一个系统的总结,通过总结对异步电机FOC有了更深的理解。
本期主要学习介绍模型预测控制(MPC, Model Predictive Control),主要分为四个部分,MPC基本原理、MPTC控制原理、仿真搭建和结果分析。文章仅代表自己所知所解,有理解错误的地方欢迎指正。如果想要模型预测转矩控制的仿真波形,关注公众号:浅谈电机控制,留下邮箱获取。
导读:本期主要介绍的是异步电机“恒压频比VF”控制,调制采用SPWM和SVPWM两种方式。如果需要文章中的仿真模型,关注“微信公众号”:浅谈电机控制,获取。