
写文章




- @weixin_47765522
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
深蓝路径规划作业-第一章
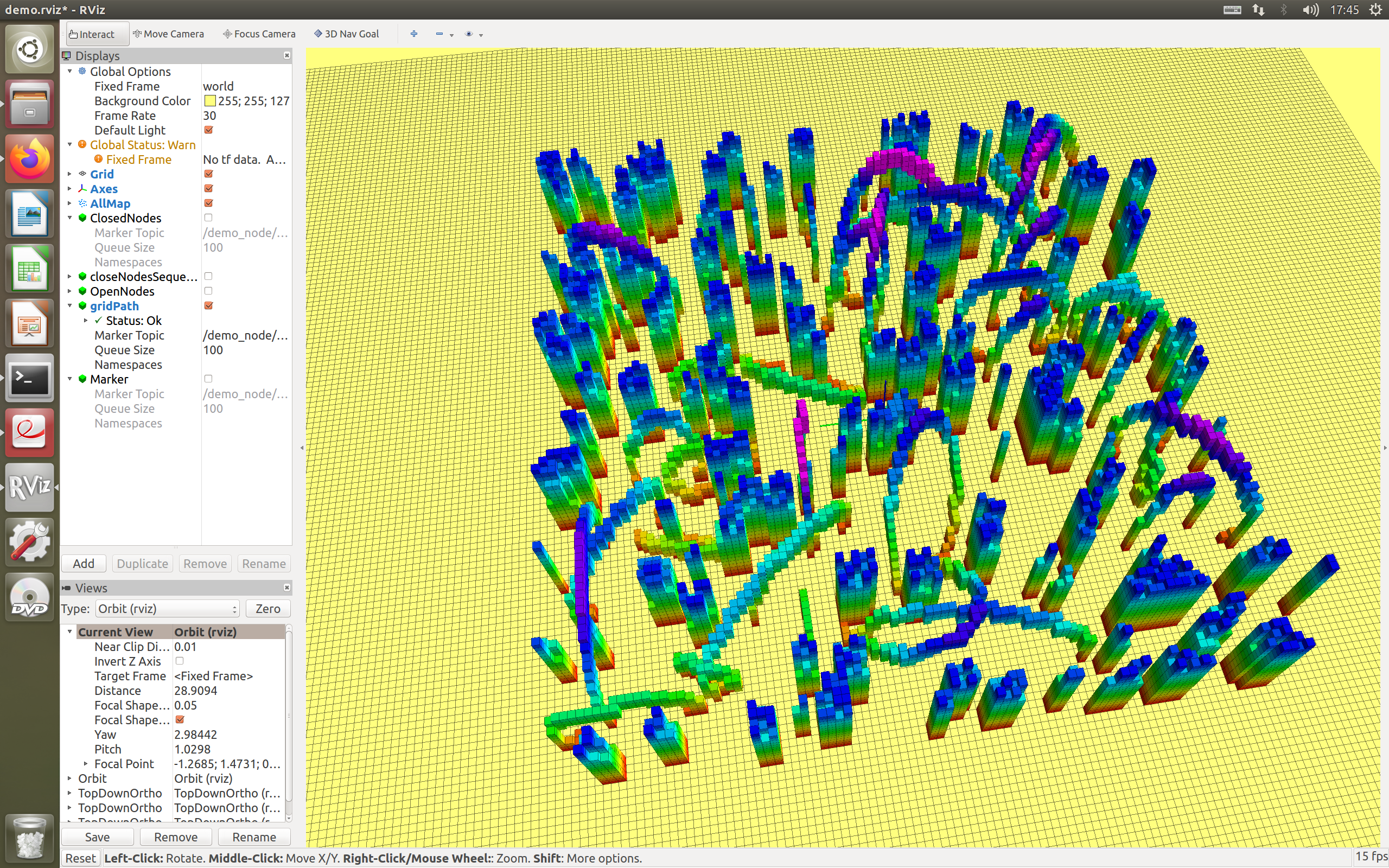
4.打开rviz,在执行rviz之前需要roscore打开ros,之后打开新的窗口,首先要保存工作路径source devel/setup.bash,然后执行rviz。1.首先根据要求创建workspace,复制第一章文件夹src到工作空间文件夹catkin_ws下。3.编译当前文件夹,需要先进入catkin_ws下:cd .. 然后编译:catkin_make。2.在当前src文件夹下初始化工作
【画图分析】rosbag结合rqt_bag和matlab分析数据
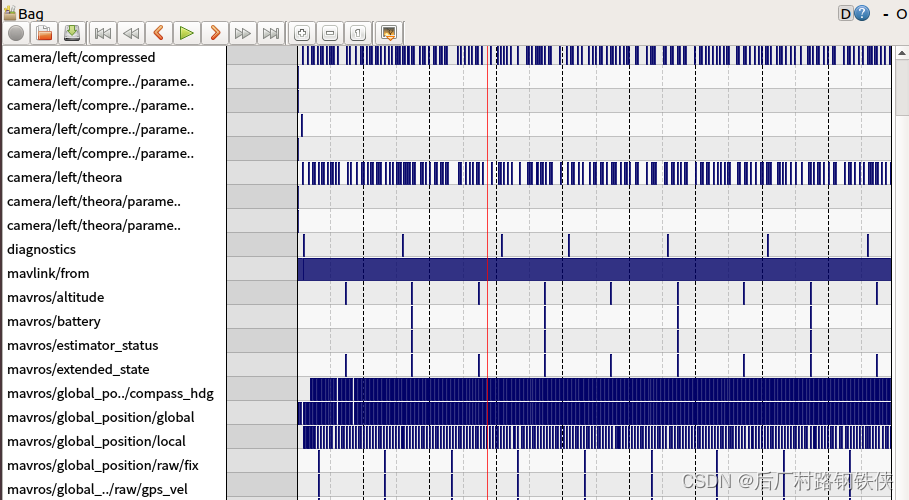
首先创建一个文件夹,cd该文件夹后,运行下面的指令记录数据记录完成后,为了定位数据,在rqt_bag中打开该文件。
深蓝路径规划作业-第三章
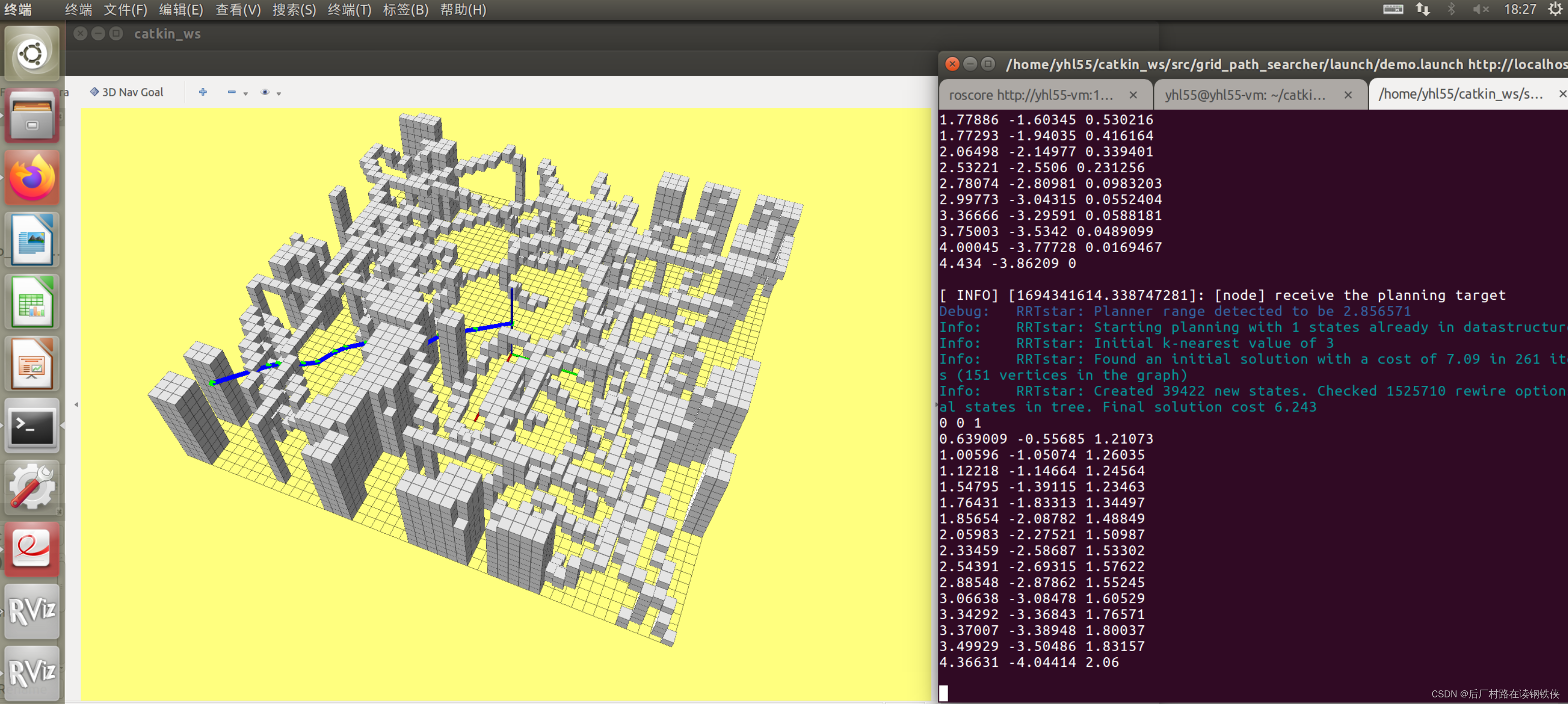
RRT是概率完备但不是最优的。
深蓝路径规划作业-第二章
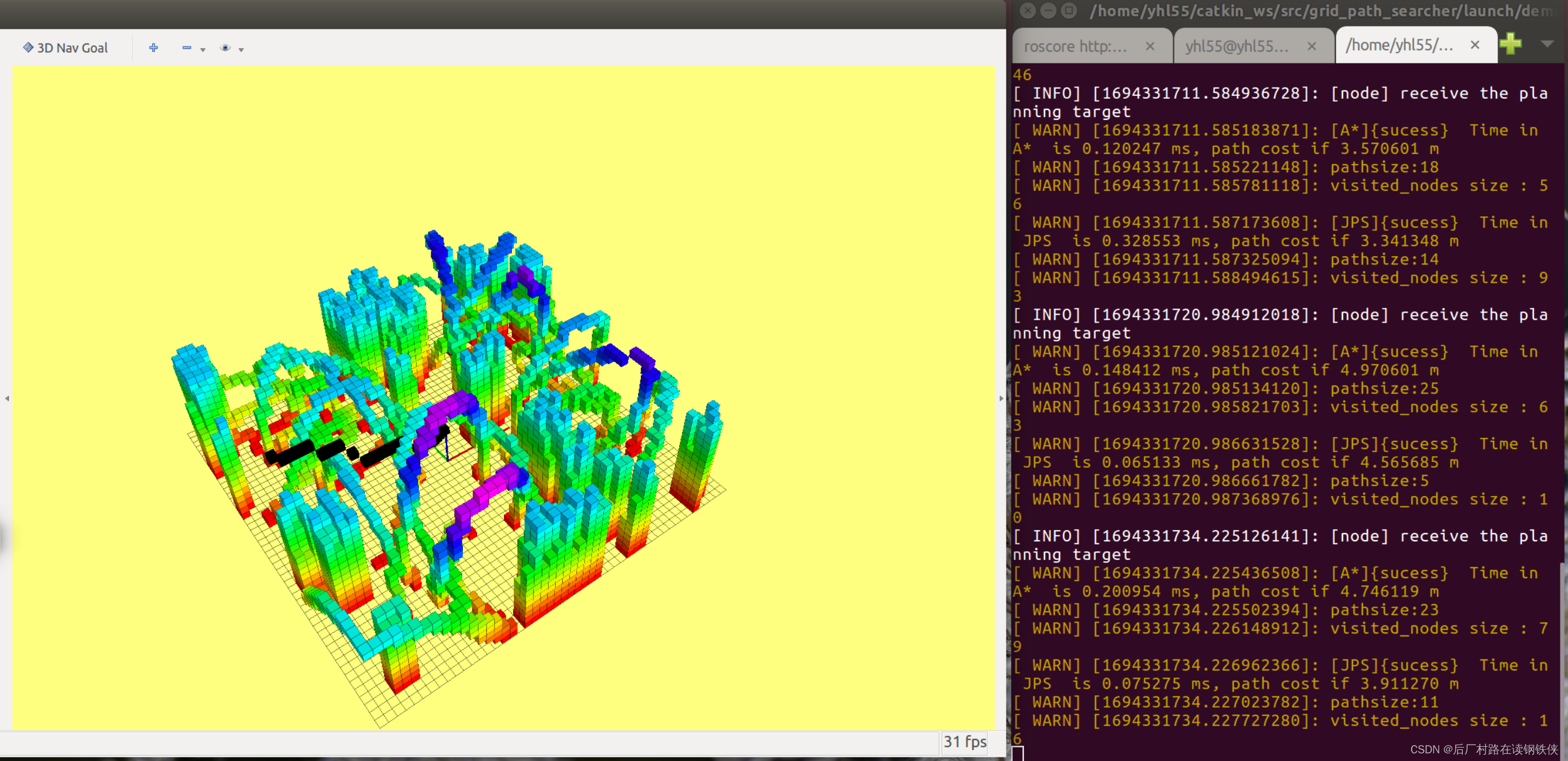
其中在A*寻找这个函数中,首先将障碍物、目标和起始点进行定义:Obstacle=-1, Target = 0, Start=1,并将这个地图乘以一个系数k。其中g(n)表示当前点的cost,h(n)表示对终点的预测,这个预测可以用0、1、2和∞范数,但L1范数(曼哈顿/出租车距离)无法保证其最优性。此外,A*算法扩展效率慢,当地图变大的时候,效率很低,计算耗时很大。这个obstacle_map主要
深蓝路径规划-L6
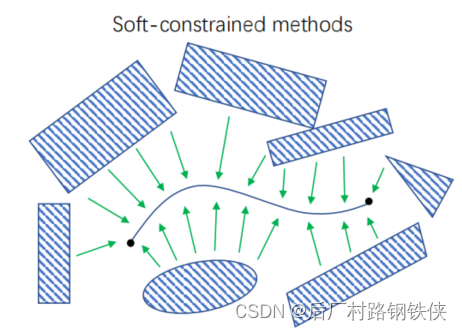
mini snap可以获得一个经过路径的点,但是可能会超调(在其他点触碰障碍)主要有两种解决思路:软约束、硬约束;软约束是将约束加在目标函数里,让目标远离边界条件。硬约束是要求全局满足。
深蓝路径规划作业-第六章
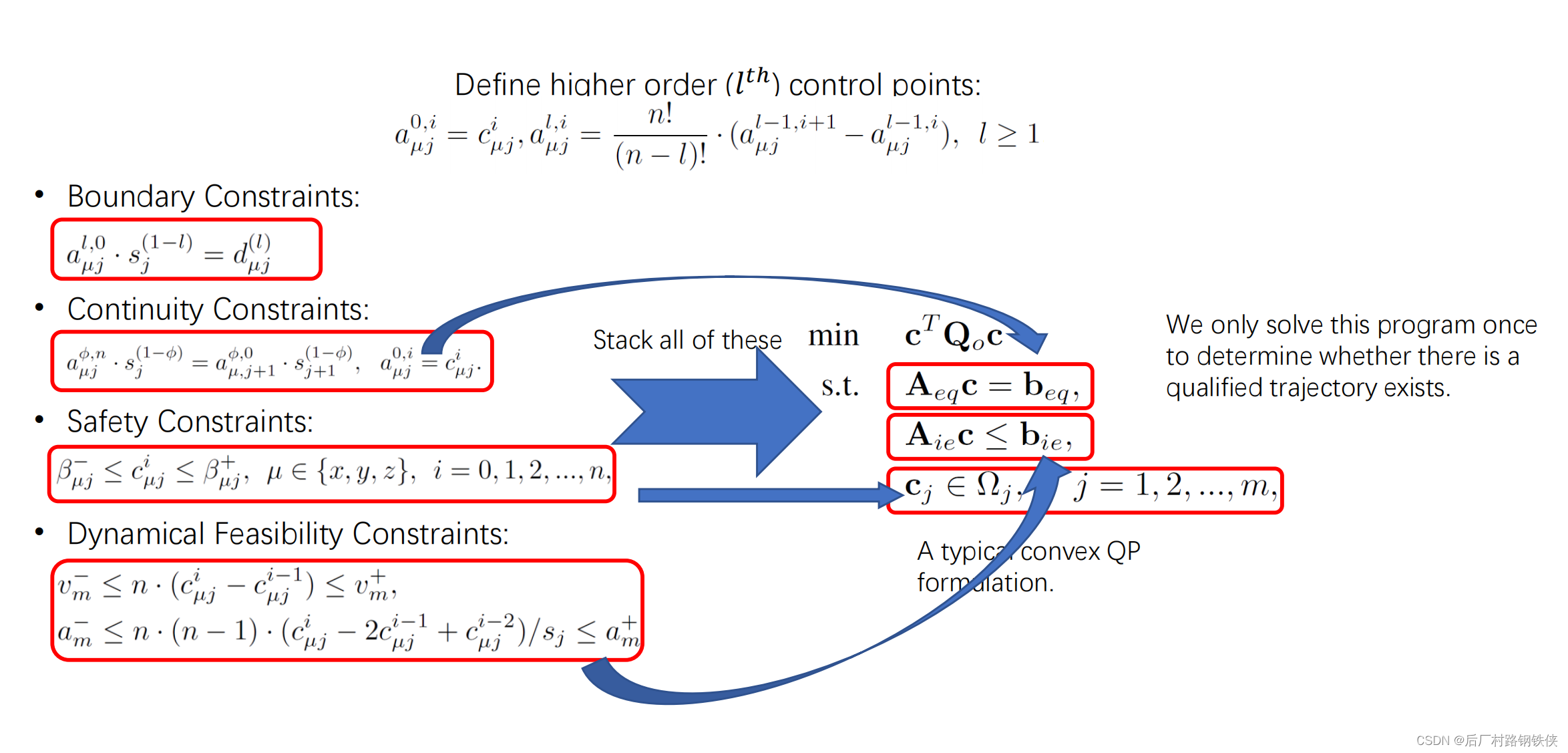
在matlab中,写一个走廊约束的分段贝塞尔曲线生成。•给出了贝塞尔到单项多项式之间的转换。•该走廊已被预定义。•只需要限制自己的位置。
浅入深出的介绍比例导引法原理及分析
参考北理工《导弹飞行力学》,对比例导引进行分析~

到底了