
写文章




- @weixin_47619495
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
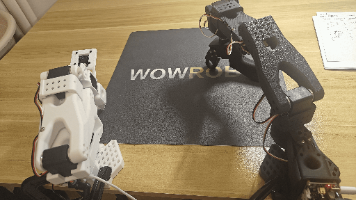
Lerobot系列:so100/101 标定与遥控
本文记录了SO100机械臂的标定和遥控操作过程。首先通过lerobot_find_port.py脚本获取主从臂USB端口ID,并设置Linux端口权限。随后使用新版lerobot-calibrate命令进行标定,分为两步:调整机械臂至中间位置,再手动控制6个电机完成行程测试。最后通过lerobot-teleoperate实现主从臂遥操功能,为后续数据采集和算法训练做准备。文章适用于Ubuntu24
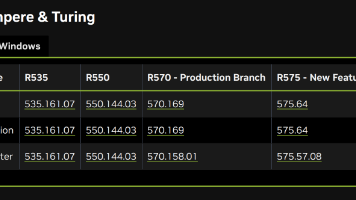
Isaac系列:Ubuntu 24.04 安装Isaac-sim 5.0 并导入lerobot—So101
显卡:4060ti 16gNvidia驱动版本:570.169Linux版本:Ubuntu 24.04。
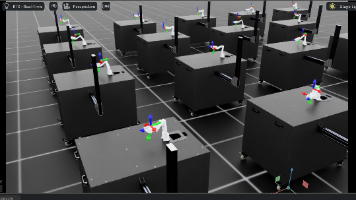
Isaac系列:Ubuntu Isaac-lib 安装,并实现lerobot的抓取仿真
本文介绍了在已安装Isaac Sim 5.0的基础上配置Isaac Lab环境的完整流程。主要内容包括:1)设置Isaac Sim环境变量;2)下载Isaac Lab并建立与Isaac Sim的软连接;3)创建conda虚拟环境;4)安装必要依赖和训练框架;5)通过机器狗行走和机械臂抓取两个示例展示训练流程。特别提供了常见错误解决方案,如处理"ModuleNotFoundError&qu
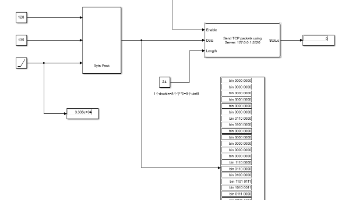
Matlab/Simulink 环境下通过TCP通讯传出仿真数据
摘要:本文介绍了使用Simulink自带TCP模块实现仿真数据实时传输的方法。通过TCP server/client模块建立连接,利用BytePack将double数据转为uint8格式传输,在接收端用DataUnpack解包还原。测试验证了传输常数和变量的可行性,并探讨了字符串传输方案(通过ASCII码转换),但指出该方法存在参数设置繁琐的问题。该方法实现了Simulink与其他软件的实时数据交
到底了