- @weixin_46579091
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
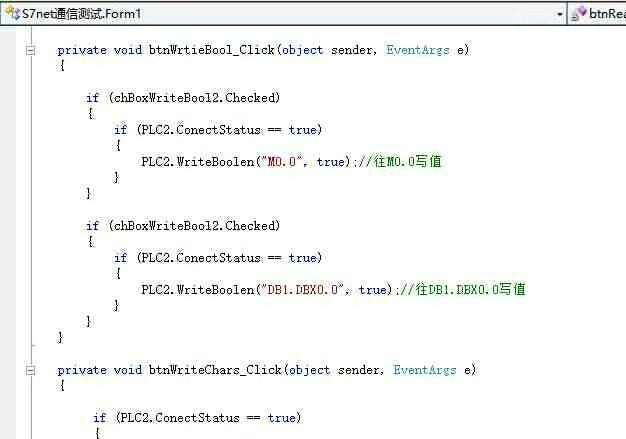
这是一个基于C#和S7.Net库开发的西门子PLC通信测试程序,提供了完整的读写功能测试界面,支持多种数据类型的通信操作。程序采用多线程架构,实现了稳定可靠的PLC通信连接管理。
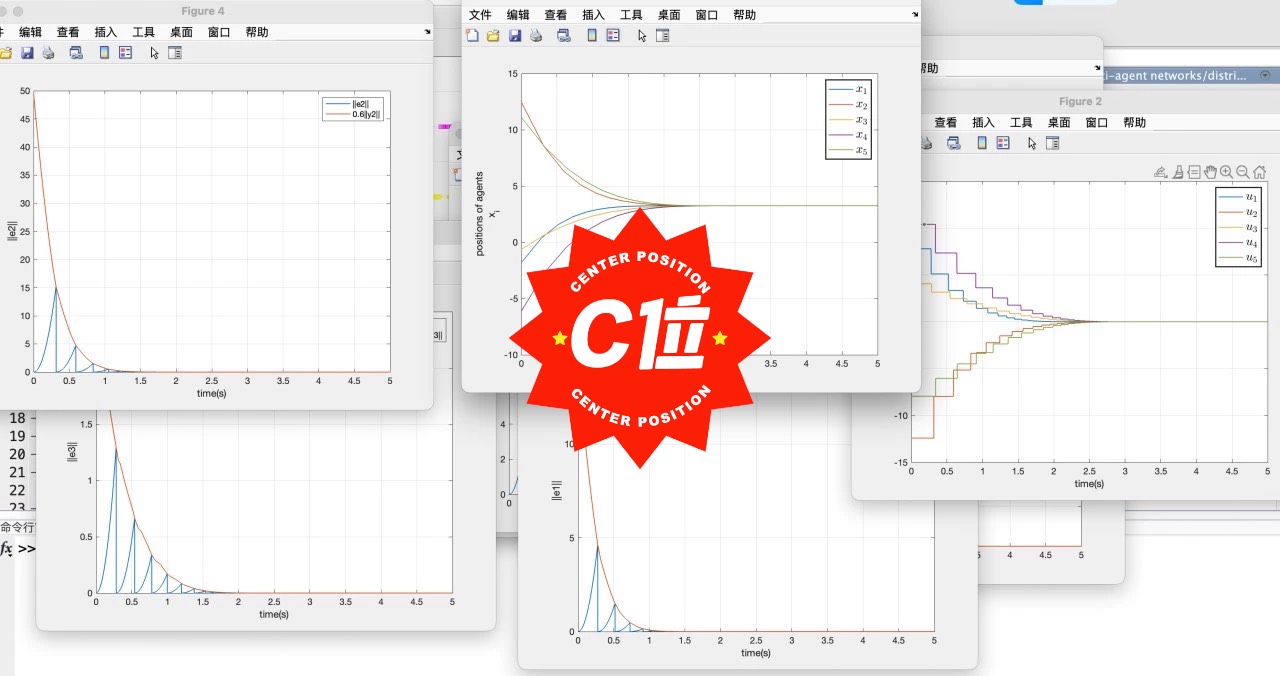
论文考虑的网络拓扑涵盖了固定或切换、无定向且连接的类型。核心在于为每个代理采用基于事件的控制方式,目标是让所有代理的状态最终达到其初始平均值。这里的事件触发方案基于二次Lyapunov函数设计,通过精心为每个代理选择事件条件,使得Lyapunov函数的导数为负,进而保证系统的稳定性与收敛性。而且,这些事件条件是采样数据且分布式的,意味着事件检测器在离散采样时刻仅依赖邻居信息与本地计算,极大地优化了
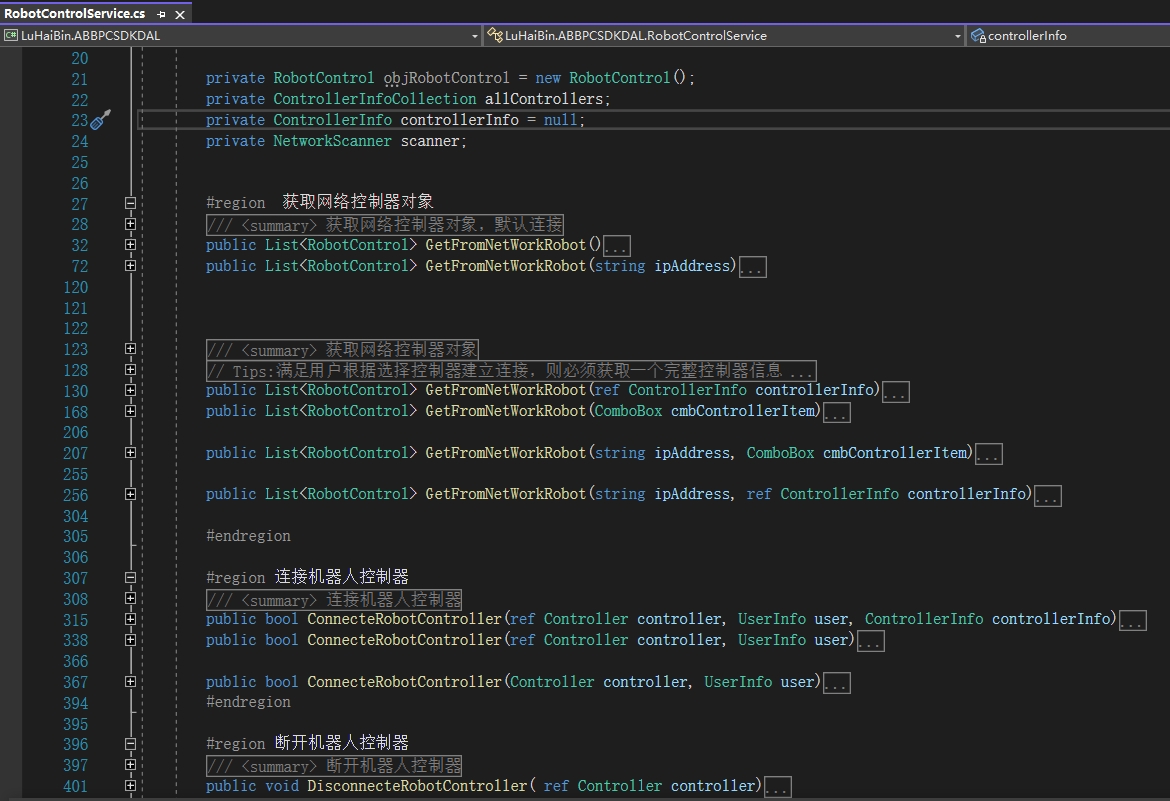
最近在折腾ABB机器人,发现他们家的数据采集与监控系统简直是工业自动化领域的"变形金刚"。今天就拿几个实战场景,带大家看看怎么用代码撬开这个系统的保险箱。【ABB机器人数据采集与监控系统】是一款覆盖网络通信、远程控制、移动机器人、位姿数据采集、信号数据采集、程序编辑、程序传输、系统备份、系统恢复、输出日志等多种功能为一体的软件。这套系统最骚的操作还是日志分析,用ELK堆栈搞个实时监控看板,能看到机
路径可视化后能看到,算法聪明地把时间窗临近的客户安排在同一条线路,就像玩拼图时把形状匹配的碎片凑在一起。1、以带时间窗物流路径问题(VRPTW)相关理论作为基础,结合物流运输中心条件以及客户点需求情况等,将时间窗与车辆载重量作为主要约束条件,寻求总成本的最小值;1、以带时间窗物流路径问题(VRPTW)相关理论作为基础,结合物流运输中心条件以及客户点需求情况等,将时间窗与车辆载重量作为主要约束条件,

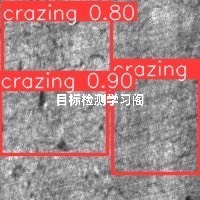
1、数据集:钢材缺陷数据集包含6个类别:"crazing","inclusion","patches","pitted_surface","rolled-in_scale","scratches"对应钢材表面夹杂、划痕、压入氧化皮、裂纹、麻点和斑块6种缺陷。这些新版本的模型能够更准确地识别细微的缺陷,并且对复杂背景下的缺陷检测有更好的鲁棒性。本文所使用的钢材缺陷数据集包含了6个类别的缺陷图像:"c
单相逆变器重复控制。采用重复控制与准比例谐振控制相结合的符合控制策略,spwm调制环节采用载波移相控制,进一步降低谐波。仿真中开关频率20k,通过FFT分析,谐波主要分布在40k附近,并没有分布在20k附近,载波移相降低了谐波含量。整个仿真完全离散,采用离散解析器,包括采样与控制的离散,控制与采样环节没有使用simulink自带的模块搭建,全部手工搭建。在电力电子领域,单相逆变器的控制策略一直是研
比如同时要优化计算节点的选择、CPU频率分配、传输功率设定,这堆参数搅在一起简直让人头秃。跑出来的结果挺有意思:在20个任务、5个边缘节点的场景下,DE算法相比粒子群优化(PSO)节省了约23%的能耗,时延降低了15%左右。有个小彩蛋:在绘制能量-时延的帕累托前沿时,发现几个边缘节点存在明显的资源闲置,这为后续研究混合节点协作提供了新思路。有意思的是,离散参数在变异后会出现小数,这时候直接四舍五入
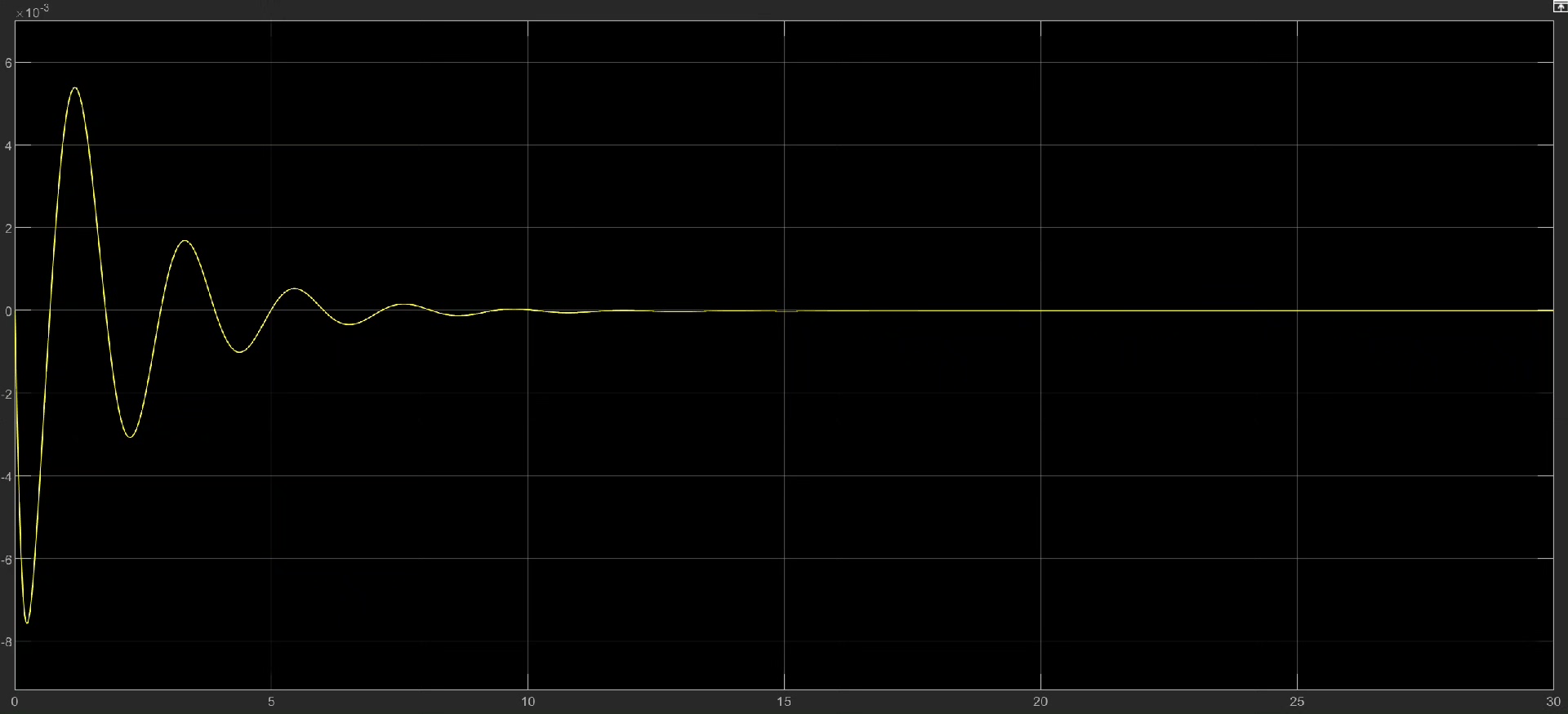
simulink二次调频,传统两区域互联模型基础上加入风电机组,进行AGC调频双区域模型,负荷频率控制可直接运行,运行效果见图二,运行速度快在电力系统研究领域,Simulink 一直是模拟与分析的强大工具。今天咱们来聊聊在传统两区域互联模型基础上,加入风电机组实现 AGC(自动发电控制)调频的有趣事儿。
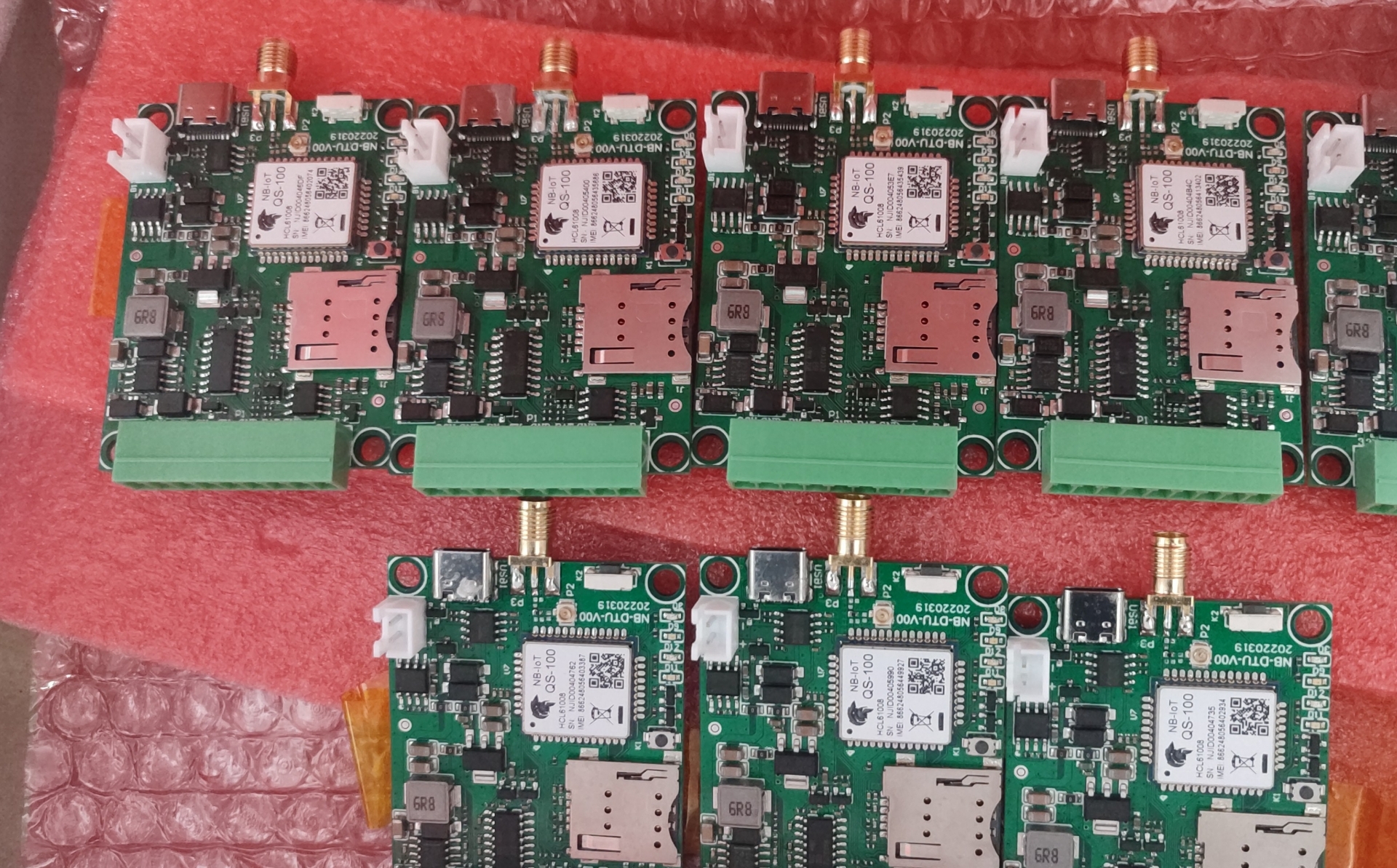
今天咱们来唠唠NB-IoT Open MCU QS100这个神仙方案,说真的这玩意儿能把功耗做到0.7μA的水平,简直是把省电玩到了极致。先看硬件设计这块,板子上必须整活——双层PCB布局必须得把射频模块和MCU隔开,实测发现把天线区域铺成净空区能提升至少20%的信号质量,这种骚操作可比光改代码见效快多了。专业nbiot open MCU qs100方案,tcp udp mqtt协议,低功耗0.7
在机器学习调参的苦差事里,萤火虫算法给SVM加了个BUFF。想象一群萤火虫在参数空间里扑腾,亮度高的会吸引周围的同伴聚拢——这不就是天然的超参数搜索器么?双重循环看着吓人,实际时间复杂度也就O(n²),比遗传算法的选择交叉变异省心。实测在Iris数据集上,30只萤火虫迭代50轮就能找到C=8.2、gamma=0.12的优质参数,比网格搜索快三倍。当看到参数空间的等高线上,萤火虫群从四散到聚拢,准确