
写文章




- @weixin_46444742
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
视觉SLAM十四讲学习笔记——第一二讲
研0学生,放假宅家,本科期间对其感兴趣,故开始学习。一个人学有点无聊,可以一起来学呀!参考书:高翔《slam十四讲》第二版我会在我的笔记中,结合自己的理解复述内容,并对代码部分完成复现。有问题的可以留言或者私信噢!开发环境:虚拟机Ubuntu22.04+Vscode。.........
OpenCV打开摄像头,RGB转HSV空间
有段时间没有更新了,最近主要在忙一个项目,用到了OpenCV,故想把一些常用代码在这里备份一下,一起学习。环境:Pycharm+Python3.7
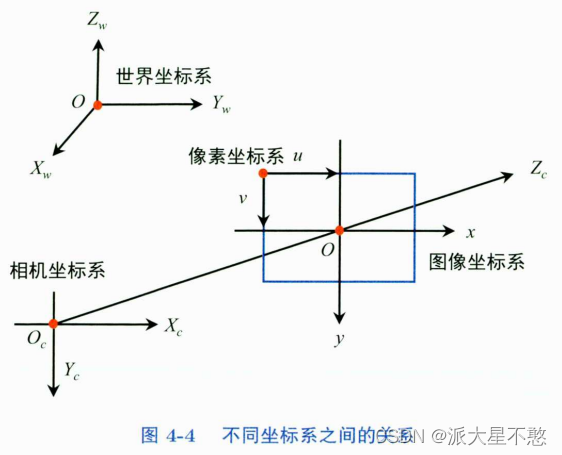
视觉里程计系列(3):什么是视觉里程计(visual odometry)及相机模型
视觉里程计的主要任务是根据图像对相机的运动(包括旋转和平移)进行估计。它根据图像序列序列,估计相机的运动轨迹和场景的空间结构,而SLAM需要再此基础上通过后端进一步优化,通过闭环检测改善飘移的情况,从而构建地图。
【4】 ROS2学习——常用工具之rqt模块化可视化工具
ROS2学习——常用工具之rqt模块化可视化工具
【1】Ubuntu环境下OpenCV读取图片出错。报错:cv2.error: OpenCV(4.5.4) ./modules/imgproc/src/color.cpp:182
Ubuntu环境下OpenCV读取图片出错。报错:cv2.error: OpenCV(4.5.4) ./modules/imgproc/src/color.cpp:182
到底了