




- @weixin_45590420
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
梅卡曼德提供完整的"眼脑手"AI+3D视觉机器人解决方案,核心产品包括Mech-Eye工业3D相机系列、Mech-Vision/Viz智能软件平台及具身智能系统。其硬件产品具备高精度(0.05-1.0mm)、强抗干扰特性,软件平台支持零代码开发与深度学习模型训练。该方案已在汽车、物流、3C电子等行业规模化应用,实现无序抓取、智能装配等功能,部署超17,000台设备,相比国外同类
梅卡曼德提供完整的"眼脑手"AI+3D视觉机器人解决方案,核心产品包括Mech-Eye工业3D相机系列、Mech-Vision/Viz智能软件平台及具身智能系统。其硬件产品具备高精度(0.05-1.0mm)、强抗干扰特性,软件平台支持零代码开发与深度学习模型训练。该方案已在汽车、物流、3C电子等行业规模化应用,实现无序抓取、智能装配等功能,部署超17,000台设备,相比国外同类
梅卡曼德提供完整的"眼脑手"AI+3D视觉机器人解决方案,核心产品包括Mech-Eye工业3D相机系列、Mech-Vision/Viz智能软件平台及具身智能系统。其硬件产品具备高精度(0.05-1.0mm)、强抗干扰特性,软件平台支持零代码开发与深度学习模型训练。该方案已在汽车、物流、3C电子等行业规模化应用,实现无序抓取、智能装配等功能,部署超17,000台设备,相比国外同类
近期DeepSeek如此火爆,全民跃跃欲试,奈何频繁的【服务器繁忙,请稍后再试】,让探索的路上体验不佳。前驱力量紧接着发布【如何本地化部署DeepSeek】的指导,尝试过程中苦于自己电脑的硬件条件,运行7B/14B的结果确实让人也难以满意。所以最佳解决思路呢,学习整合资源站在巨人肩膀,借助硅基流动和Cherry Studio的联合,实现只要你的电脑能上网,无需较高配置,就能轻松使用DeepSeek
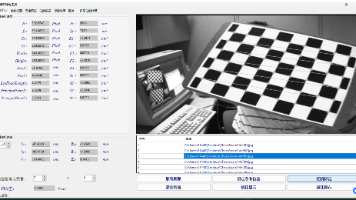
本文介绍了一个基于Windows Forms的3D手眼标定系统,该系统主要用于机器人视觉应用中相机与机器人基座坐标系的精确标定。系统采用模块化设计,包含相机标定、手眼标定和点云处理三大核心模块。相机标定模块通过棋盘格图像计算相机内参和畸变系数;手眼标定模块利用机器人位姿和相机位姿数据计算坐标变换矩阵;点云处理模块支持多种格式点云数据的加载、可视化和配准。系统提供了友好的图形界面,并集成了关键算法实
主要是由于访问了一个为null的对象。你可以通过确保对象已初始化、使用条件判断来检查对象是否为null,或者启用可空参考类型来减少此类错误的发生。在调试时,逐步检查代码执行路径,并关注对象的初始化顺序,可以帮助你有效地定位并修复此异常。

近期DeepSeek如此火爆,全民跃跃欲试,奈何频繁的【服务器繁忙,请稍后再试】,让探索的路上体验不佳。前驱力量紧接着发布【如何本地化部署DeepSeek】的指导,尝试过程中苦于自己电脑的硬件条件,运行7B/14B的结果确实让人也难以满意。所以最佳解决思路呢,学习整合资源站在巨人肩膀,借助硅基流动和Cherry Studio的联合,实现只要你的电脑能上网,无需较高配置,就能轻松使用DeepSeek