




- @weixin_45209433
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
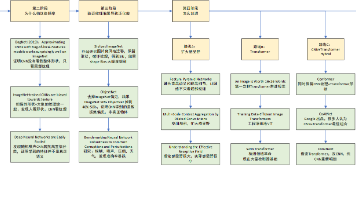
上图是最近一直以来,零零散散看的论文,进行了一个简单的梳理。
在论文之前的例子中已经提到过,信息的不同片段在同一时刻需要同时存在大脑中,每个部分之间互相约束,同时作用,这种就是平行分布处理,这些模型认为,信息处理是通过简单处理单元之间的相互作用来完成的,每个单元都会向其他单元发送兴奋或者抑制信号。认知过程本身就是大量信息互相约束的过程!这段是PDP的思想的提出,第一次提出unit的含义,同时又告诉我们,unit 的含义是不固定的,不同模型里的unit可以表示
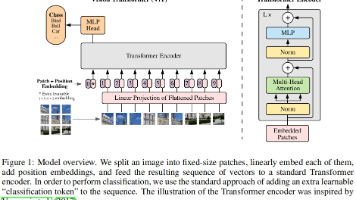
说实话,只看这个整体架构图,即使看了论文,还是不明白这个框架是什么,所以直接debug github 上的 vit-pytorch 中的VIT结构,先学习模型结构,再深入理解背后含义。
说明,以下内容右chatgpt生成,为了个人多次深刻理解,现记录下来,供反复理解。
说明,以下内容右chatgpt生成,为了个人多次深刻理解,现记录下来,供反复理解。
说明,以下内容右chatgpt生成,为了个人多次深刻理解,现记录下来,供反复理解。
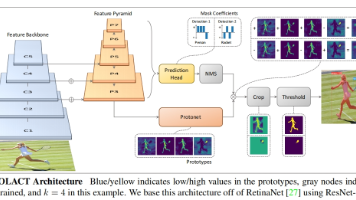
先看的YOLOV8的分割原理,在YOLOV8里面第一次了解到了prototypes maks,原型掩码,当时不是非常的明白,最近看到YOLACT,yolov8的 prototypes maks 的思想,应该是来自这里。具体yolov8分割流程,可以移步我的另一篇文章=》=》=》
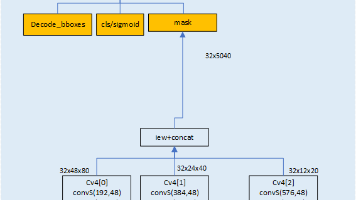
在ultralytics工程中,通过debug的形式,对yolov8m-seg测试一张图片的过程进行逐步查看,画出以下网络结构图。
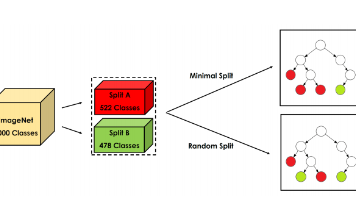
下图中可以看到,超过127个类别的后,迁移学习的新能是微弱的递增,如果说,是因为,PASCAL 任务只有20个类别,因此在127个类别上预训练不会导致性能下降,但是SUN-CLS是397个类别,综合考虑这两个例子,虽然在大量的类别上进行预训练当然是很好的,但是但当预训练使用的不同类别超过127个时,收益就会递减。,ImageNet数据集中,1000个类别,每个类别使用500张图片进行预训练,然后在
在ultralytics工程中,通过debug的形式,对yolov8m-seg测试一张图片的过程进行逐步查看,画出以下网络结构图。