




- @weixin_45031928
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
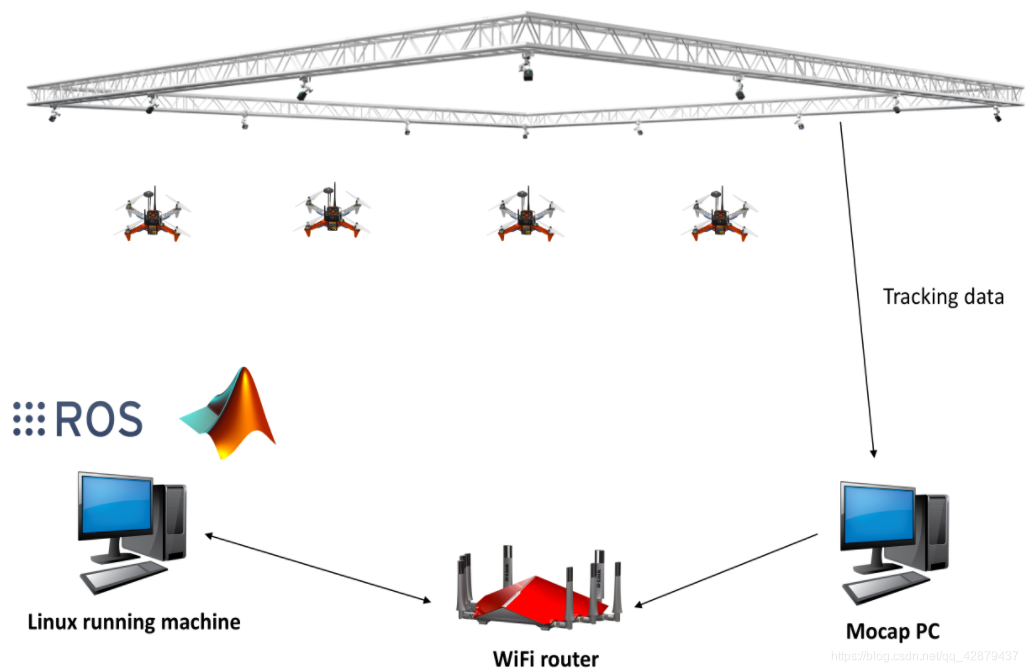
这篇文章介绍了如何配置基于PX4飞控的无人机系统,通过ROS或其他MAVLink系统从MoCap/VIO系统获取数据。主要介绍如何设置像VICON和Optitrack这样的MoCap系统,以及像ROVIO、SVO和PTAM这样的VIO系统。
使用双系统安装Ubuntu系统并搭建PX4开发环境,并下载PX4源码,配置好编译环境和工具链(ROS操作系统+mavros通信包+jMAVSim仿真+gazebo仿真+QGC地面站)。教程中使用的是Ubuntu20.04系统,PX4固件版本为v1.13.0,步骤中大部分都使用了快速安装脚本,十分方便高效。

主要介绍了安装vrpn_client_ros2库将动捕数据转换ROS2话题。执行以下命令编译vrpn_client_ros2,其中。执行以下命令拉取vrpn_client_ros2代码。执行以下命令运行vrpn_client_ros2节点。拉取完成后,编辑代码中的配置文件。之后重新编译软件包并运行节点即可。替换为实际使用的ROS2版本。执行以下命令安装VRPN库。编辑代码中的launch文件。

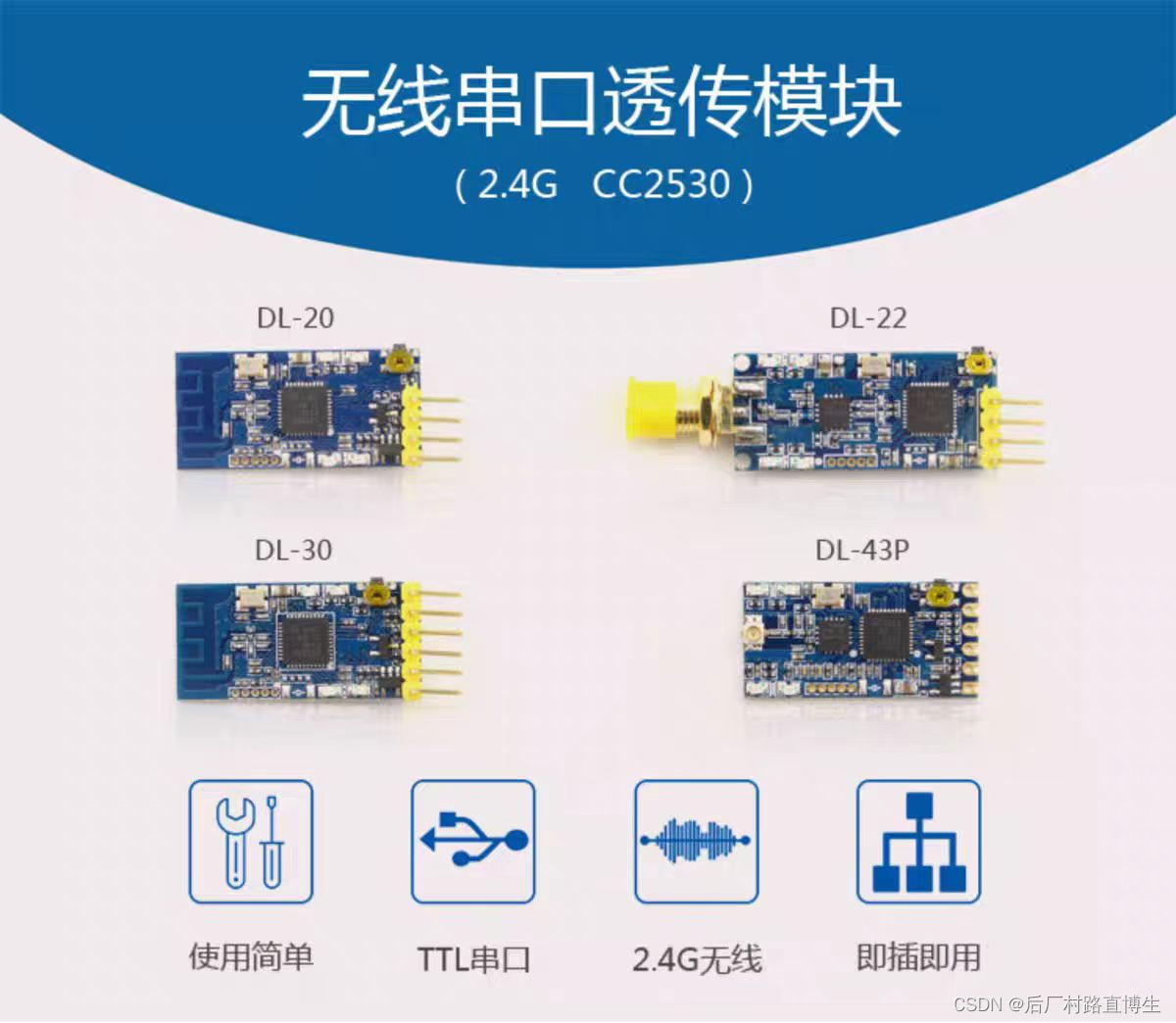
DL-20&DL-22&DL-30&DL-43P无线串口透传和ZigBee组网使用方法。
主要介绍在通过MAVROS功能包的offboard模式控制gazebo中的飞机起飞到高度两米时遇到无法起飞的BUG,重复报错INFO [commander] Failsafe mode deactivated,INFO [commander] Failsafe mode activated,重复报错CMD: Unexpected command 176, result 0,重复报错Offboard

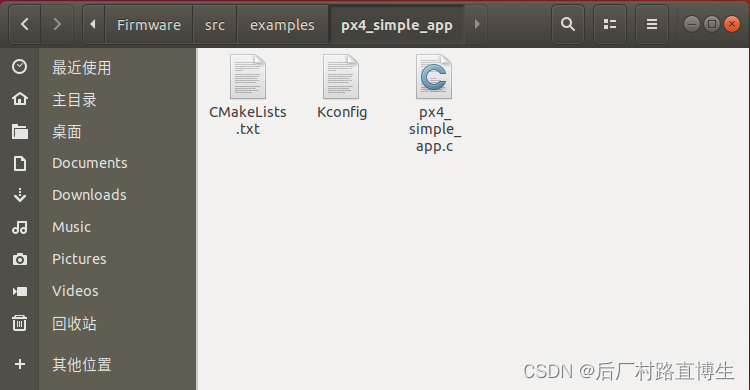
本文主要说明如何在PX4中搭建并运行你的第一个板载应用程序,输出"hello sky"。
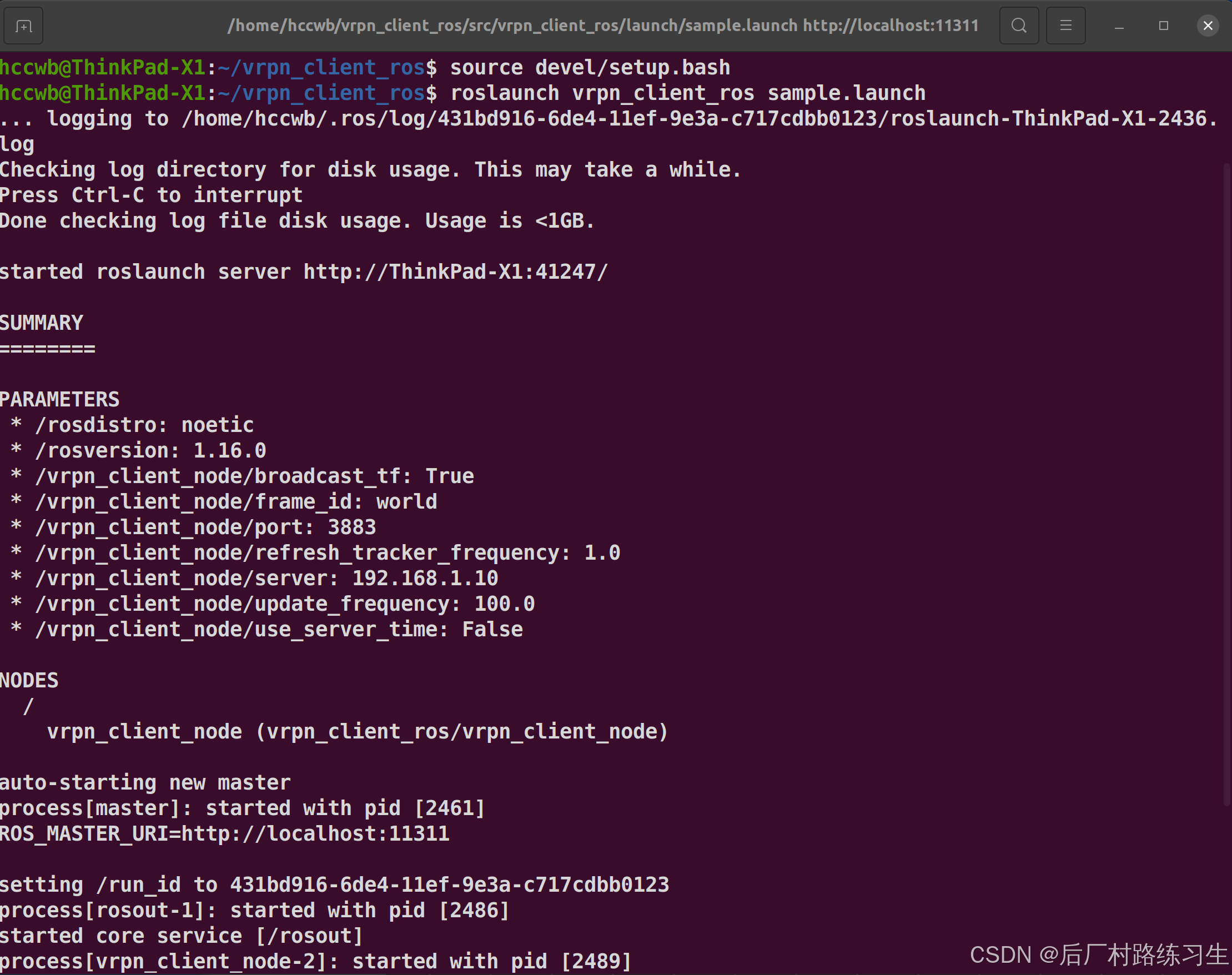
主要介绍了安装vrpn_client_ros库将动捕数据转换ROS话题。执行以下命令拉取并编译vrpn_client_ros代码。执行以下命令运行vrpn_client_ros节点。编辑代码中的launch文件。执行以下命令安装VRPN库。
本文讲解了uORB主题订阅发布机制,以及分析了如何订阅发布传感器主题的例程、如何定义自己的主题消息的例程。
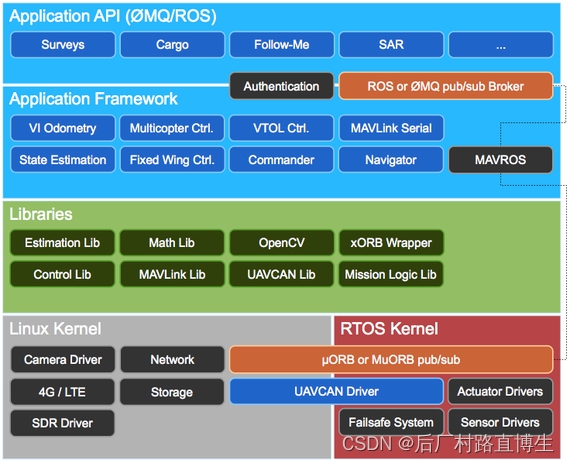
梳理PX4&Gazebo&MAVROS&ROS&ROS2之间的关系。仿真是在尝试现实世界中飞行之前测试PX4代码的一种快速、简单且安全的方法。PX4的UDP端口14550用于与地面站进行通信。地面站侦听此端口上的连接,QGroundControl默认侦听此端口。PX4的UDP端口14540用于与Offboard模式板外电脑进行通信。Offboard模式板外电脑应侦听此端口上的连接。仿真器的本地TC

学习PX4开发需要先配置好开发环境,对于新手推荐使用VMware虚拟机搭建Ubuntu系统,并下载PX4源码,配置好编译环境和工具链(ROS操作系统+mavros通信包+jMAVSim仿真+gazebo仿真+QGC地面站+QT开发平台)。如果你不想配置相应的环境,可以选择导入阿木实验室配置好的Ubuntu系统。