
写文章




- @weixin_43824278
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
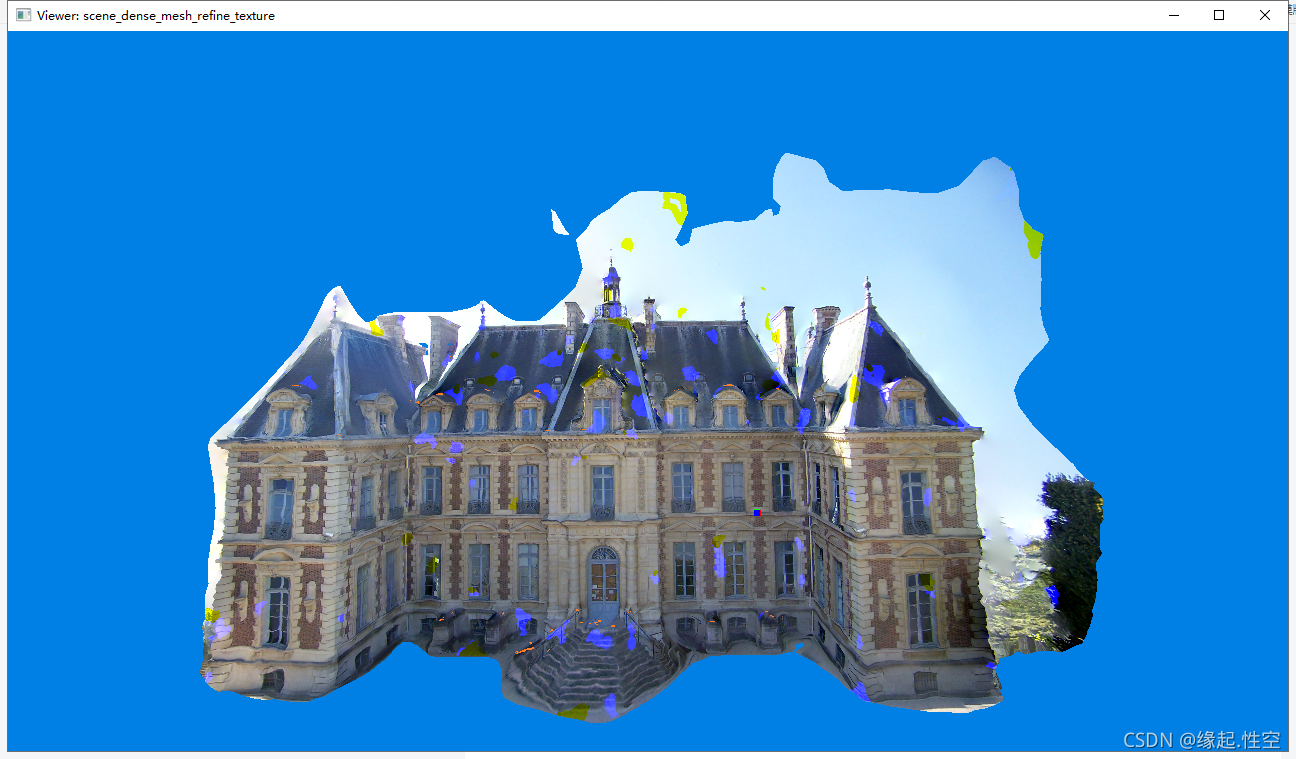
跑通openmvs第一个项目(保姆式教学)(Windows+c++)
首先上一篇文章详细介绍了openmvs的环境配置。此篇文章记录一下跑通GitHub openmvs示例项目的全过程。首先openmvs开源项目中使用Sceaux Castle图像和OpenMVG管道来恢复相机位置和稀疏点云。此时可以选择自行配置OpenMVG后来恢复相机位置和稀疏点云。由于完整的示例(包括模块的 Windows x64 二进制文件)可以在OpenMVS_sample 中找到。所以此
相机成像模型、内参矩阵、外参矩阵
相机针孔成像模型基本的小孔成像过程: X坐标系是针孔所在坐标系,Y坐标系为成像平面坐标系,P为空间一点,小孔成像使得P点在图像平面上呈现了一个倒立的像,俯视图如下: 由三角相似关系可以得到: 初步相机矩阵相机成像的本质:就是三维空间坐标到二维图像坐标的变换,这是一个投影过程 。相机矩阵就是建立这种三维到二维的投影...
相机成像模型、内参矩阵、外参矩阵
相机针孔成像模型基本的小孔成像过程: X坐标系是针孔所在坐标系,Y坐标系为成像平面坐标系,P为空间一点,小孔成像使得P点在图像平面上呈现了一个倒立的像,俯视图如下: 由三角相似关系可以得到: 初步相机矩阵相机成像的本质:就是三维空间坐标到二维图像坐标的变换,这是一个投影过程 。相机矩阵就是建立这种三维到二维的投影...
到底了