




- @weixin_43728093
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
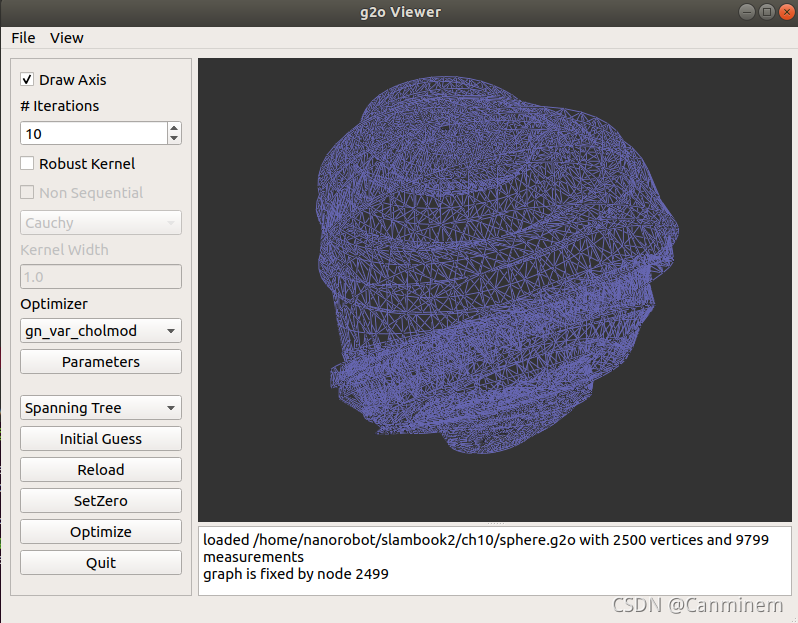
问题:g2o_viewer没有被安装弯路:在g2o软件包目录/home/nanorobot/slambook2/3rdparty/g2o/g2o/apps/g2o_viewer下找到g2o_viewer,并编译g2o_viewer,在cmake ..后发现报错,尝试网上的帖子对camkelists.txt进行修改,还是会有很多报错。解决方法:1、先安装一些库:sudo apt-get instal
介绍L1范数、L2范数、p范数、无穷范数的计算公式
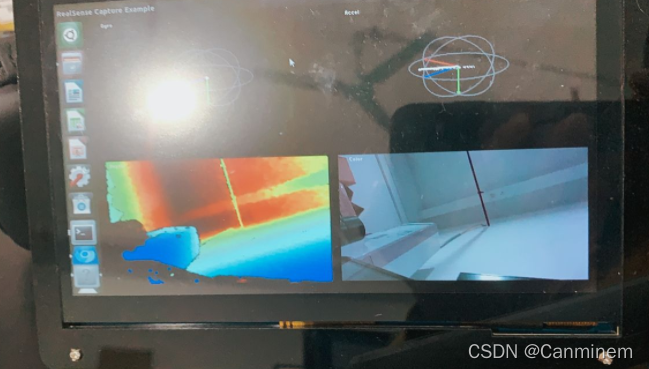
一、安装驱动cd ~git clone https://github.com/jetsonhacksnano/installSwapfilecd installSwapfile./installSwapfile.shrebootcd ~git clone https://github.com/jetsonhacksnano/installLibrealsense//下载自己想要的版本,这里使用2.
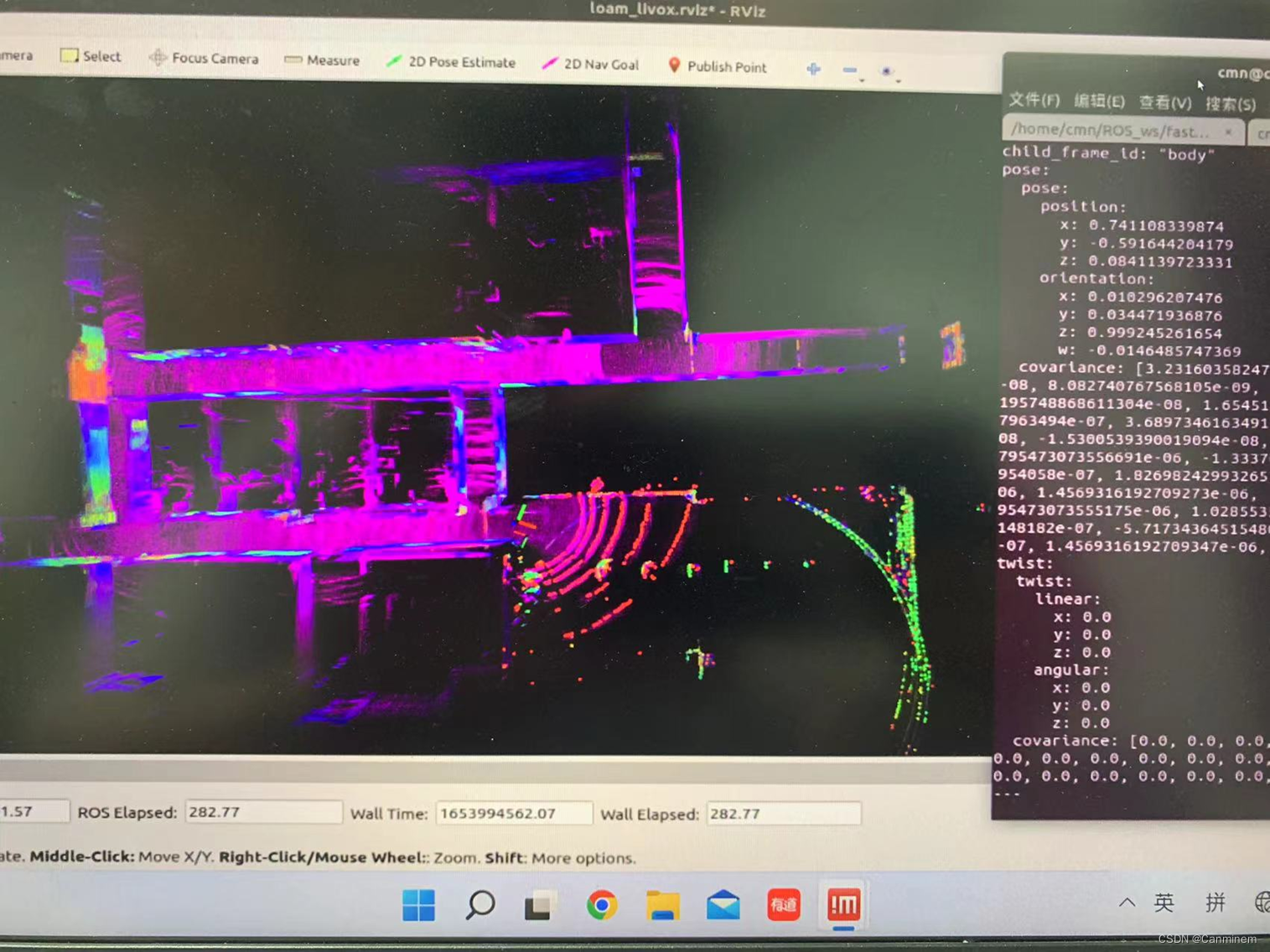
一、标定所使用设备激光雷达:velodyne16线激光雷达IMU:来自Pixhawk2.4.8飞控二、安装lidar_align联合标定激光雷达和IMU外参程序2.1 下载源码建议下载修正过后的代码:lidar_align_wwtx新建自己的ROS工作空间,将该源码放入,catkin_make即可。如果编译时出现Could not find NLOPTConfig.cmake解决办法:找到这个文件
1、进入vmware的全屏模式,然后鼠标任意位置单击几下(目的是让鼠标操作的对象是虚拟机)。然后按【Ctrl】+【Alt】+【F2】,输入用户名和密码。如果没有跳出让你输入用户名和密码的界面,则鼠标再点击几次。2、输入【df -h】查看磁盘使用情况,若/dev/sda1 已用为100%,则需删除磁盘内一些大文件(下面的是我已经处理好了,如何删除:rm -r 文件目录/文件名),直至为95%左右,此
sudo apt update 报错:E: Malformed entry 1 in list file /etc/apt/sources.list.d/ros-latest.list (Component)