




- @weixin_43667077
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
【代码】【iconv】Linux c++ 中文字符串转十六进制 GBK 编码/内码。

此处注意 ortools 较新的版本(9.6)需要 C++20 编译标准(cmake-3.18,G++10),虽然切换 cmake 和 G++ 版本很方便,但是会导致很多系统原有的代码无法编译通过,所以选择 ortools 9.1 版本。下载好源码压缩包(zip 格式或 tar.gz 格式)后,解压,并 cd 到解压出的文件夹,例如。在 CMakeLists.txt 中根据以下形式使用 ortoo
【代码】c++ eigen 求矩阵伪逆。
【代码】windows c++ 修改 opencv 读写文件的像素大小限制 OPENCV_IO_MAX_IMAGE_PIXELS。
中代码的给参数变量赋值部分还可以使用。因此 YAML 文件中需要在首行定义。其运行输出如下,与第一种方法一致。
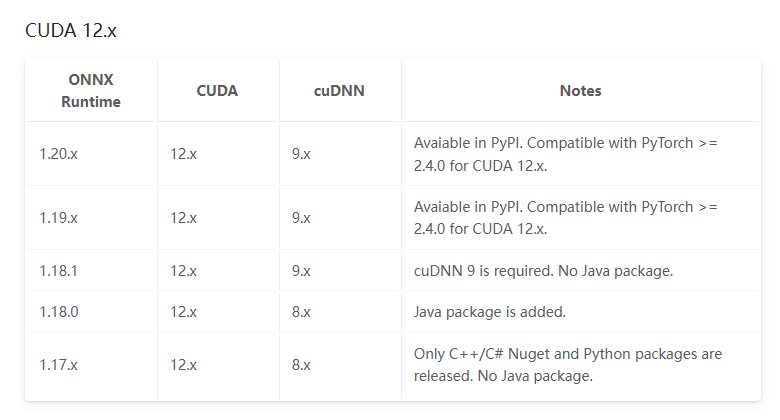
注:CUDA 是大版本内互相兼容的,所以任意支持 CUDA-11 版本的。要求的 CUDA-12 与系统的 CUDA-11 版本不符导致。都支持任意 CUDA-11 版本的环境。直接安装支持 CUDA-11 的。重新运行代码,顺利结束。
可以明确指定在当前 conda 等虚拟环境内操作,可以避免把 pip 包安装到默认环境中去等问题。由于 2.3.3 安装失败,就选择尝试安装 2.2.3 版本,安装成功。经过尝试,安装较低版本的 pandas 可以解决该问题。
【代码】具身智能、自主导航相关代码、论文集合。

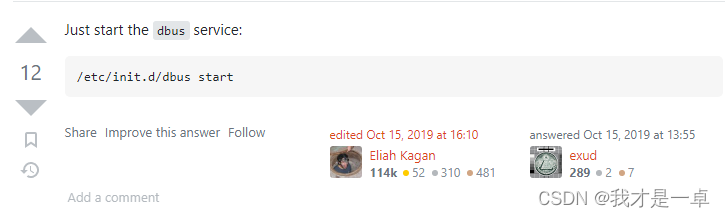
【代码】解决 apt install 时报错 dpkg: error processing archive xxx.deb (--unpack): trying to overwrite ‘xxx‘
