




- @weixin_43297891
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
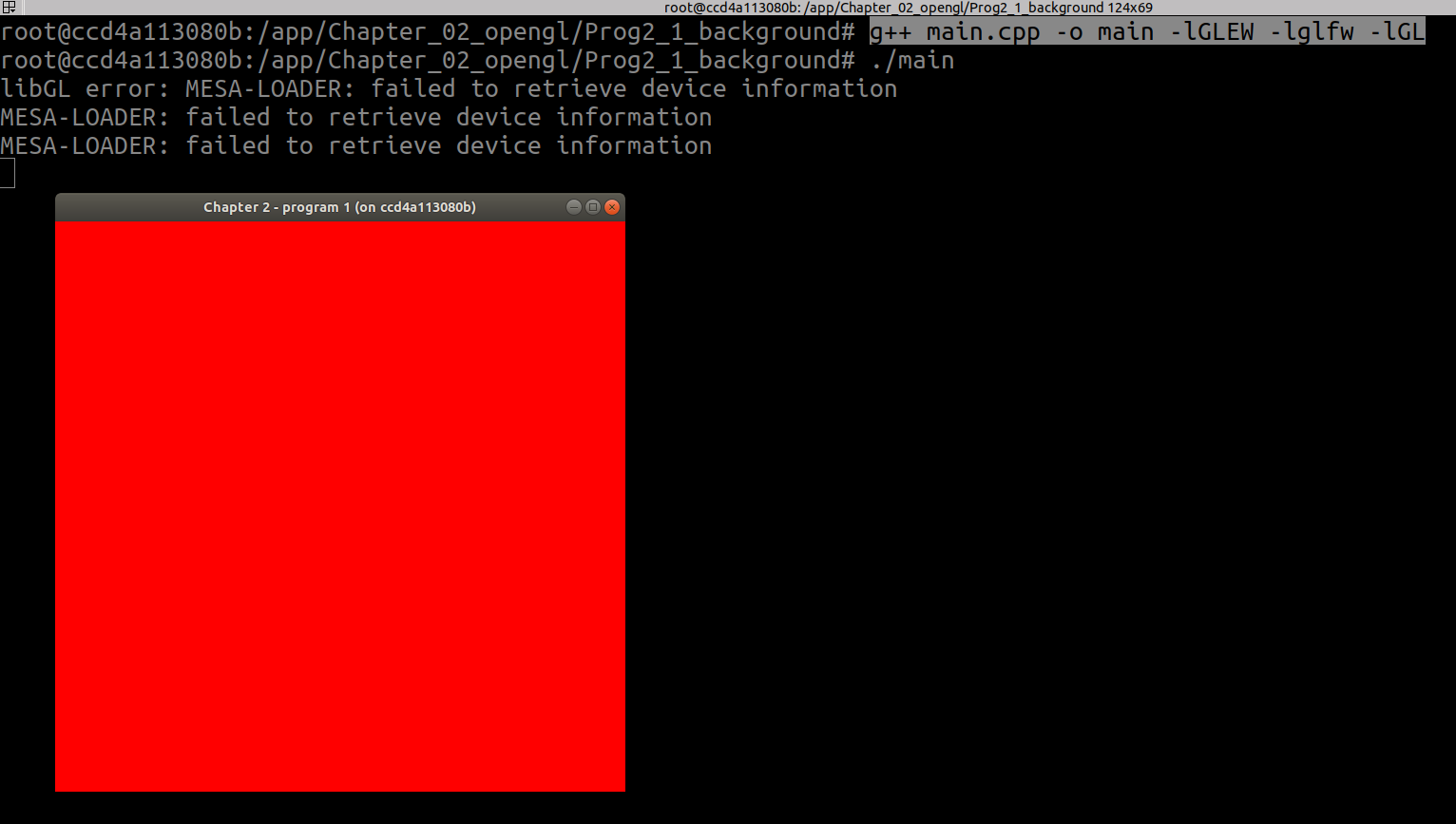
— 2024-07-30 晚上。

术语中文关键作用常见场景Spawn生成/派生创建并启动新单元游戏对象、进程、协程Archetype原型实体按组件组合分组ECS 架构Entity实体唯一身份标识ECS、游戏对象Handle句柄间接引用资源资源管理、OS APIHelper辅助类提供工具方法通用工程代码Impl实现接口/Trait 的具体实现如果你是在某个具体框架(比如 Bevy、Unity DOTS、Spring 等)中遇到这些词

画一条线画一个矩形画一条路径设置颜色、线宽、选中、移动自定义方式基类开发成本灵活度可复用 Qt 现成绘制推荐场景继承具体图元类低中高改行为,不大改外观继承抽象形状基类中中高中自定义形状,但仍然想用pen/brush继承最基础抽象类高最高低完全自定义复杂图元适合:本质上就是矩形,只加一点行为。public:protected:特点不用自己写不用自己写paint()改行为最方便虽然不是图元,但在自定义

【代码】git笔记之清理本地存在但远程不存在的分支。

— 2024-04-03 夜。
如果你已经做了一个commit,但还没有将其push到远程仓库,并且希望修改这次commit的信息,你可以使用命令进行操作。下面是一步一步的指导:打开你的命令行工具。使用git log查看最近的commit,确保你要修改的是最近一次的commit信息。这将打开你的默认文本编辑器,允许你修改commit信息。在编辑器中修改commit信息,然后保存并关闭编辑器。如果你想直接在命令行中修改commit

向前删除一个字符:X向后删除一个字符:x选中字符:v将选中的字符复制粘贴:y+p跳到行首:0跳到第一行:gg跳到最后一行:G
which pythonwhereis python
editor.pyimport importlib.abcimport importlib.utilimport osimport platformimport reimport stringimport sysimport tokenizeimport tracebackimport webbrowserfrom tkinter import *from tkinter.font import