




- @weixin_43030192
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
个人强化学习总结,根据西湖大学强化学习线上教学视频,是赵老师主讲

个人强化学习总结,根据西湖大学强化学习线上教学视频,是赵老师主讲
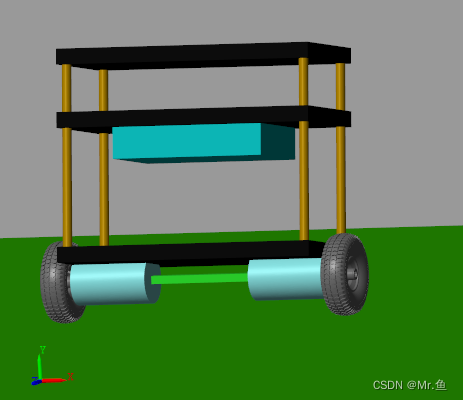
基于单片机STM32的两轮平衡小车,单片机的各种IO、定时器、通讯等等一大堆要理解、编程,但这些都是琐碎的文档知识,需要花时间看各个模块的接口文档进而编程,需要良好的编程逻辑思维,去获取相关的传感模块信息,以及输出数据给相关的模块,核心其实是怎么处理这些数据,怎么去控制相关的对象,这个没有文档可查,平衡小车其控制算法就是系统的核心,结合自控原理的学习,通过matlab来模拟平衡车可用的控制算法,以
最近要开发MCP 项目,uv工具使用是官方推荐的方式,逐要了解这个uv工具。整体理解如下:一.uv工具的基本情况UV 是一个由 Rust 编写的现代化 Python 包管理工具,旨在通过极速性能和一体化功能替代传统工具(如 pip、virtualenv、pip-tools 等),覆盖依赖管理、虚拟环境创建、项目配置、依赖锁定等全流程操作。其核心优势在于(比 pip 快 10-100 倍)、(支持和
open3d常用api
记录一下最近完成的一个小玩意。一、pipeline:1.完成手眼标定(外参),获得相机坐标与机器人base坐标的变换矩阵。参考上一篇博文2.用opencv 对抓取物件图片进行去背景处理、找轮廓和中心点处理,得到抓取点的pixel index。3.利用realsense SDK获取抓取点到相机坐标系下的z值,以及内参(fx,fy,ppx,ppy)。4.利用下面的公式计算出相机坐标系下的抓取点xyz,
最近要开发MCP 项目,uv工具使用是官方推荐的方式,逐要了解这个uv工具。整体理解如下:一.uv工具的基本情况UV 是一个由 Rust 编写的现代化 Python 包管理工具,旨在通过极速性能和一体化功能替代传统工具(如 pip、virtualenv、pip-tools 等),覆盖依赖管理、虚拟环境创建、项目配置、依赖锁定等全流程操作。其核心优势在于(比 pip 快 10-100 倍)、(支持和