
写文章




- @weixin_41859890
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
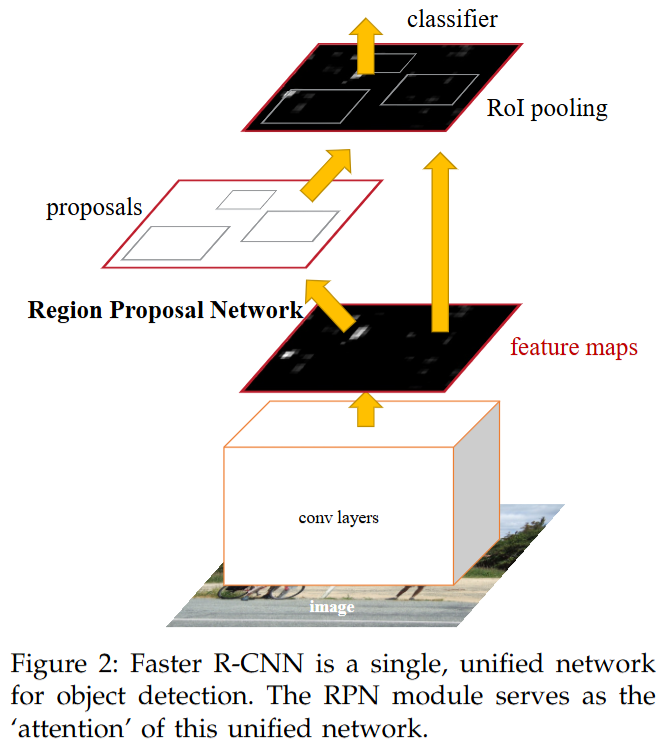
目标检测篇---faster R-CNN
方面内容❓发现的问题速度瓶颈Fast R-CNN检测网络本身很快 (GPU),但其依赖的外部区域提议算法(如) 通常在CPU上运行,速度极慢(可能耗时数秒),成为整个目标检测系统的绝对性能瓶颈。计算分离与冗余: 区域提议的计算过程 (基于底层图像特征) 与下游检测网络使用的深度卷积特征是完全分离的,未能共享计算,存在明显的计算冗余和效率低下问题 (“missed opportunity for s
书生模型实战L1---书生·浦语大模型全链路开源开放体系
第一章 入门岛L0(Linux)第二章 入门岛L0(python)第三章 入门岛L0(Git)第四章 基础岛L1(Demo)第四章 基础岛L1(Prompt)第四章 基础岛L1(RAG)第四章 基础岛L1(书生全链路开源介绍)

NAVSIM数据集---Data-Driven Non-Reactive Autonomous Vehicle Simulation and Benchmarking
Non-Reactive仿真是一种基于真实数据的自动驾驶算法评估方法,其核心特点是在仿真过程中,环境中的其他车辆和行人不会对自动驾驶车辆(AV)的决策做出反应。这种仿真方法通过短期固定规划(如4秒)来评估AV的行驶轨迹,并在简化的鸟瞰图视角下进行。评估指标PDMS(Planning Decision Making Score)由惩罚项和加权平均项组成,其中惩罚项(如无碰撞NC和可行驶区域合规性DA

到底了