




- @weald2000
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要:本文系统介绍了UART异步串口通信协议,包括其基础特性(异步全双工通信)、硬件架构(电平转换电路、收发器芯片)和标准数据帧结构(起始位+数据位+校验位+停止位)。重点分析了沁恒CH58x系列芯片的UART接口特性,支持最高9Mbps波特率、多种校验方式和可编程中断触发字节数(1/2/4/7字节)。通过实际代码示例演示了UART初始化配置、数据收发及中断处理实现,特别说明了沁恒芯片特有的字节触
MicroPython在ESP32上支持通过_thread模块实现线程功能,允许并发执行多个任务。该模块提供线程创建、锁机制等核心功能,适用于传感器数据采集与网络通信等场景。使用时需注意线程同步(通过Lock避免竞争)、异常处理及内存限制等问题。典型应用包括同时处理传感器数据上传和LED控制,但线程数量受内存限制且并非真正并行(受GIL影响)。开发者可通过延时控制协调线程执行,但无法直接设置优先级
GD32/STM32 ADC/DMA使用指南并给出了单通道ADC转换及多通道ADC转换,多通过ADC转换,我们一般采用DMA来实现转换数据的传输
舵机其实是一种伺服马达,是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。

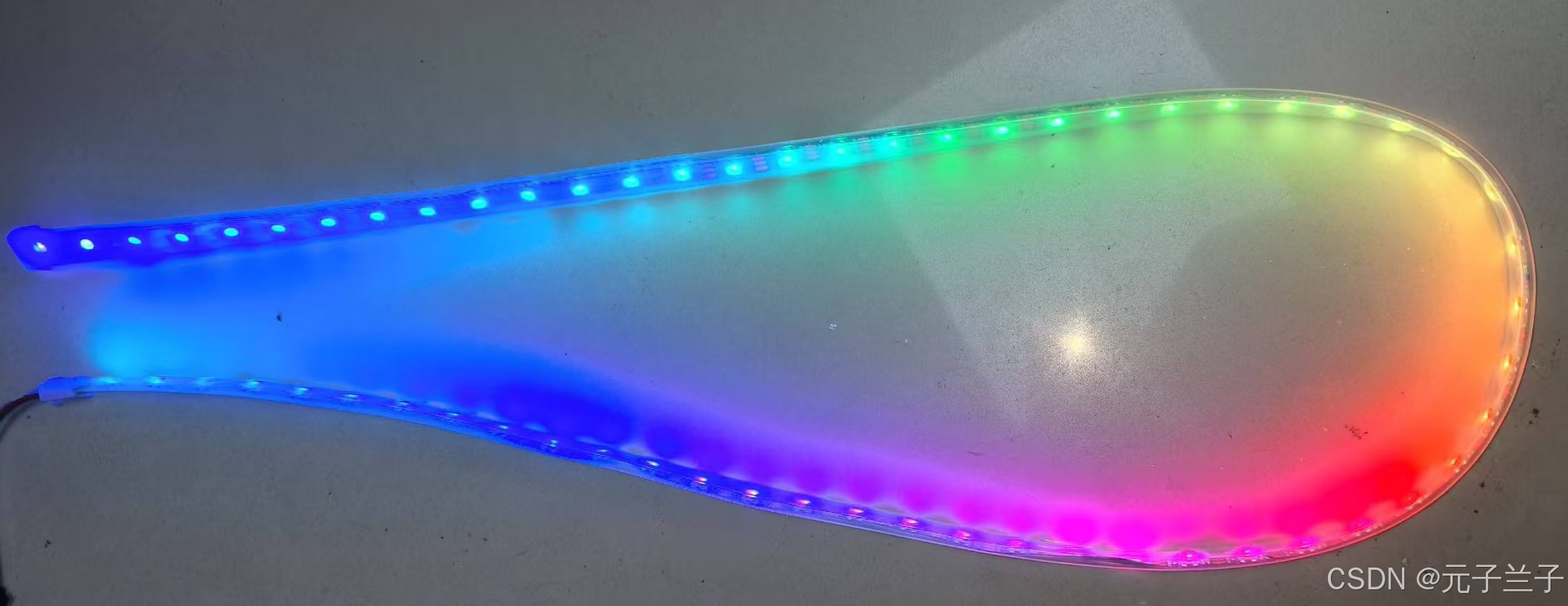
WS2812灯珠对时序要求还是比较严格的,虽然原则上可以通过直接写IO口,并用冗余代码的方式来控制时间从而达到控制WS2812灯带的目的,但这种方式几乎没有任何实用性,不同的主频需要修改代码,甚至只是简单的代码优化都需要修改代码,否则就没办法点亮灯珠。尤其是对CH582/CH592这种芯片,我们采用这种芯片的理由大多都是需要BLE功能,而要保留BLE功能就更不可能采用这种驱动方式。正是因为上述原因
如何使用 Deepseek帮忙查找MicroPython 开发的ESP32S3控制ws2812灯带的程序中的bug
