




- @wanchengkai
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
CVPR2020年发表,并不是原来YOLO系列的作者相对于YOLOV3有比较大的提升,但相对于YOLOV3-SPP提升比较少。一、相对于YOLOV3的网络结构改进:1、引入CSP结构:DARKNET53->CSPDARKNET53作者认为CSP的作用:1)增强CNN网络的学习能力;2)移除计算的瓶颈;3)降低内存开销。CSP模块如下图:2、引入SPP结构:解决多尺度问题,这个与YOLOV3-
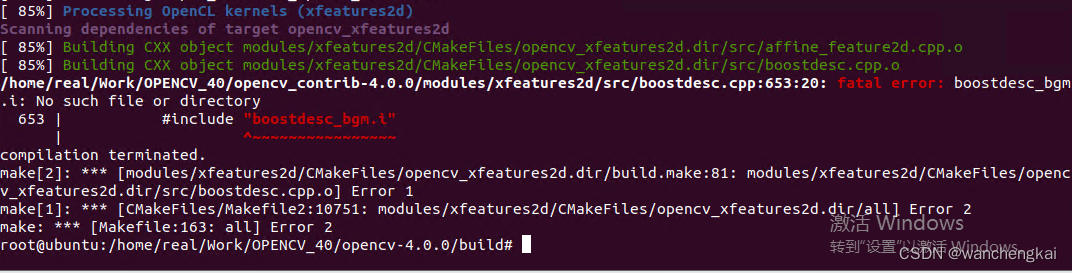
Ubuntu20.04编译安装opencv4.0.0和opencv_contrib4.0.0
发表于CVPR2018。YOLOV3本身没有太多的创新点,主要是整合了当时比较主流的一些网络的优点。1、YOLOV3的backbone改进:各个主干网络在imagenet上的运行效果。Darknet-53对比ResNet-152,top1和top5差不多,但速度快一倍。Darknet-53网络结构(53个卷积层)Darknet53主要也是采用残差块堆叠而成,但Darknet53没有最大池化层,降采
QT已安装,在系统环境变量PATH中加入下面路径:C:\Qt\Tools\mingw730_64\bin\C:\Qt\5.12.12\mingw73_64\bin\下载opencv-4.0.0-vc14_vc15.exe解压用cmake选择source、build目录:configure选择MinGW Makefiles->Specify native compilers配置C和C++编译器
注意力(Attention)机制
目标检测算法总体分为:基于区域的算法和基于回归的算法1)基于区域的算法: RCNN, Fast RCNN, Faster RCNN, Mask RCNN 等。整个检测过程分为两个阶段。在第一个阶段,检测器需要找到一些假设的区域 (ROI);在第二个阶段,检测器需要在这些假设区域上进行分类 (classification) 和 位置回归 (bounding box regression)。2)基于回