- @uXrvbWJGleS
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
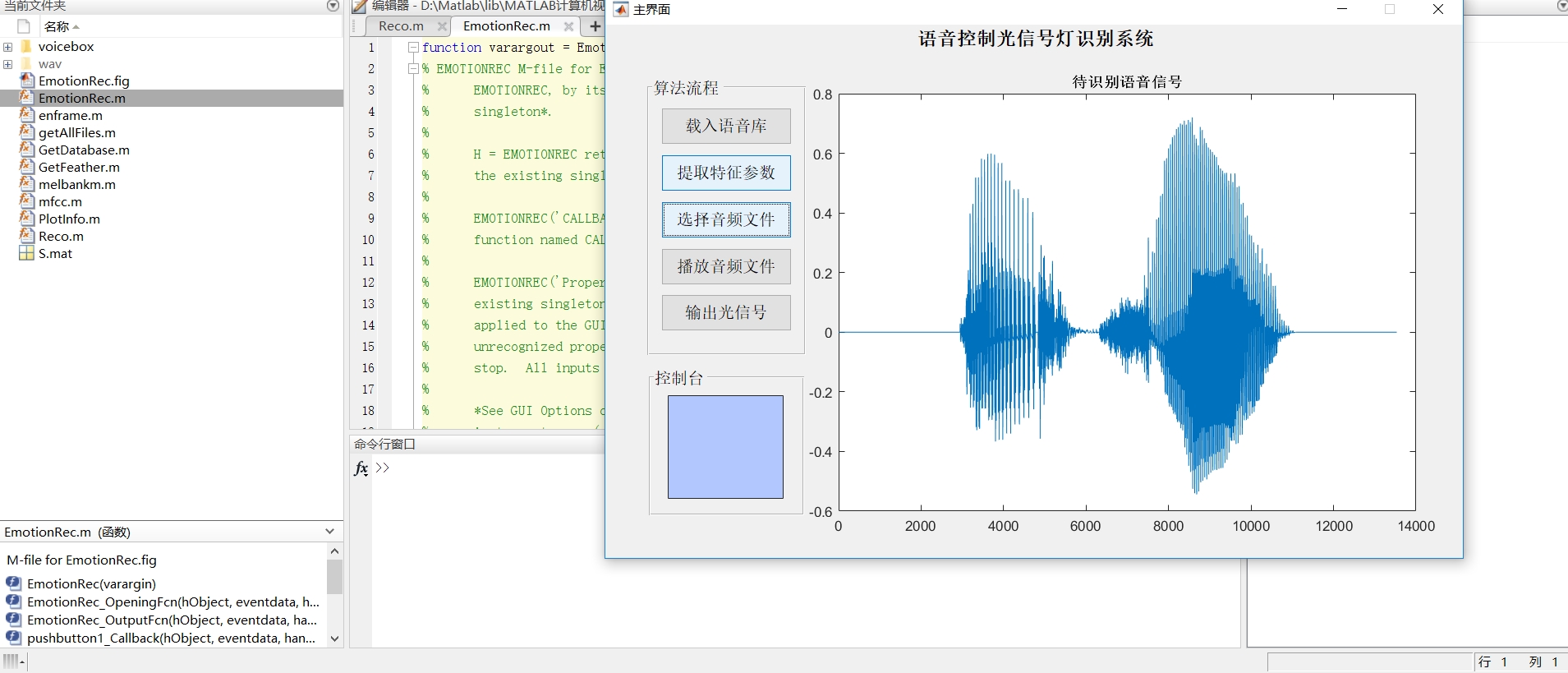
端点检测是指在语音信号中查找各种段落(如音素、音节、词素)的始点和终点的位置,并从语音信号中消除无声段,进而实现对语音有效信号段的截取。端点检测是指在语音信号中查找各种段落(如音素、音节、词素)的始点和终点的位置,并从语音信号中消除无声段,进而实现对语音有效信号段的截取。过零率像在数语音信号穿越零点的次数,浊音段的过零率通常比清音低。语音信号的端点检测是进行语音识别的一个基本步骤,它是特征训练和识
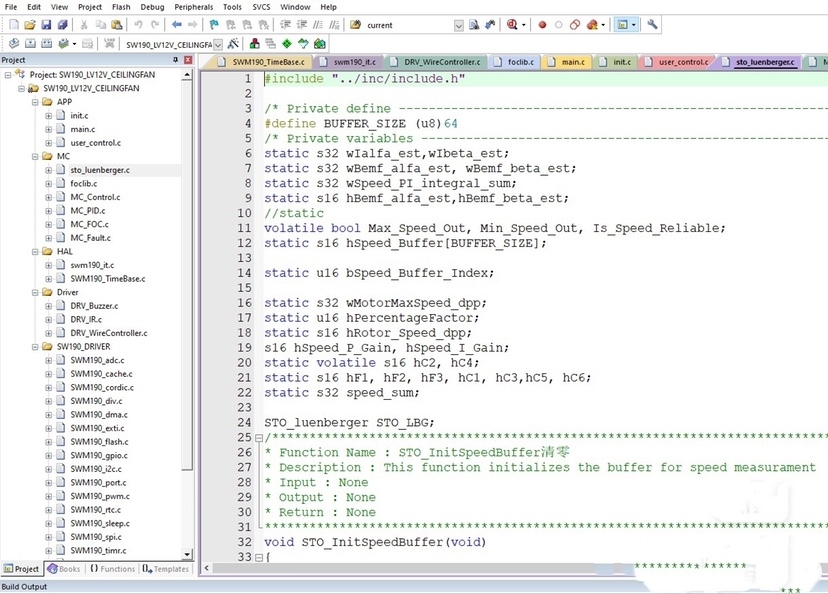
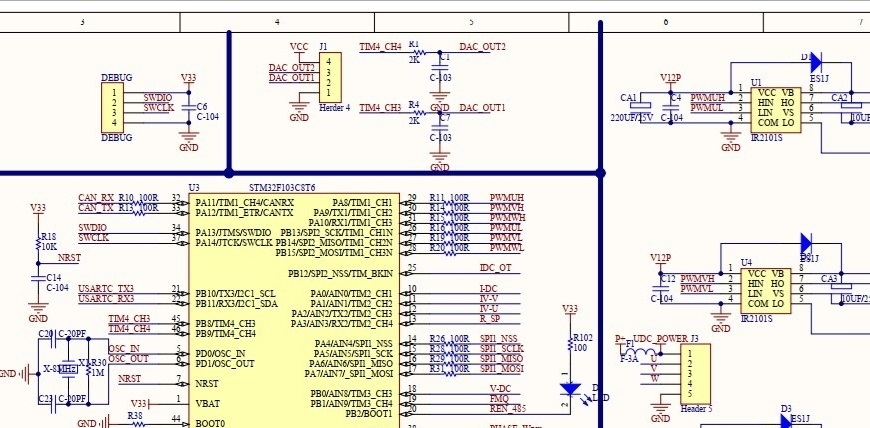
全开源代码,代码基于国产MCU芯片,大厂成熟风机量产程序,龙博格电机观测器观测角度,SVPWM,支持顺逆风启动,五段式与七段式调制等源码。全开源代码,代码基于国产MCU芯片,大厂成熟风机量产程序,龙博格电机观测器观测角度,SVPWM,支持顺逆风启动,五段式与七段式调制等源码。包含原理图和程序源代码,程序部分有注释和说明,全开源代码,支持移植到其它的MCU平台。包含原理图和程序源代码,程序部分有注释
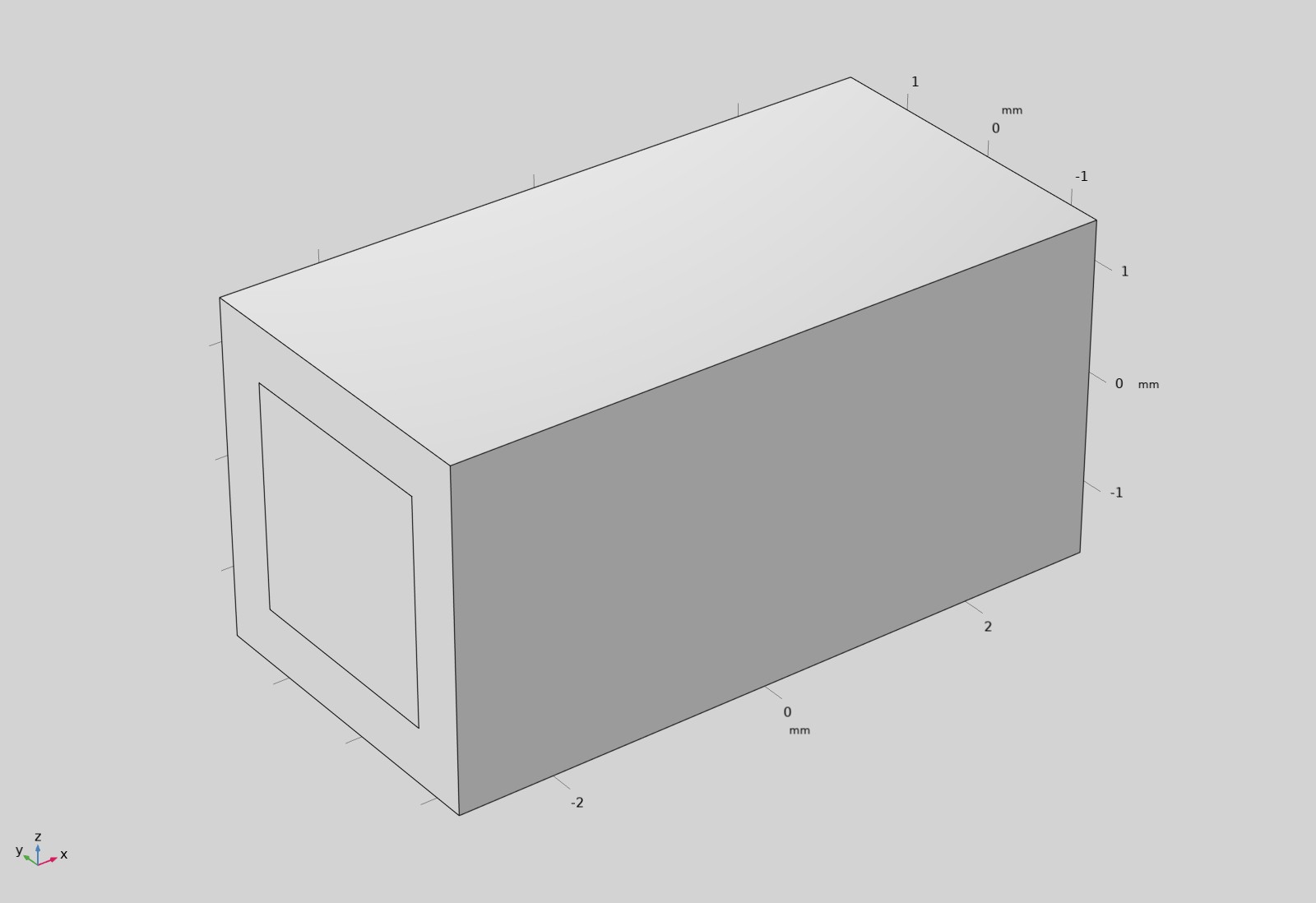
在物理场接口里勾选电磁热选项,COMSOL会自动创建两个研究:先算电磁场,再把焦耳热作为热源传到固体传热模块。特别是高频场景下,电磁场产生的损耗直接转化成热源,温度升高又反过来影响材料属性,这玩意儿就是个死循环。折腾完这套流程,最大的感悟是:电磁热耦合就像谈恋爱——单向付出(单向耦合)容易崩,双向奔赴(全耦合)才稳定。特别是做微波频段仿真时,不设置频率相关参数的话,损耗计算绝对翻车。comsol多
最后给想复现的兄弟提个醒:无感方案对PCB布局敏感,采样电阻到MCU的走线要尽量短。最近在捣鼓一个全开源的电机驱动项目,用STM32F1实现了有感和无感的BLDC/PMSM驱动。这玩意儿挺有意思,尤其是无感方案在资源紧张的F1上跑起来还有点挑战性,今天就跟大伙儿唠唠实现细节。无传感的实现是基于反电动势过零点实现的,有传感的霍尔实现。无传感的实现是基于反电动势过零点实现的,有传感的霍尔实现。永磁同步
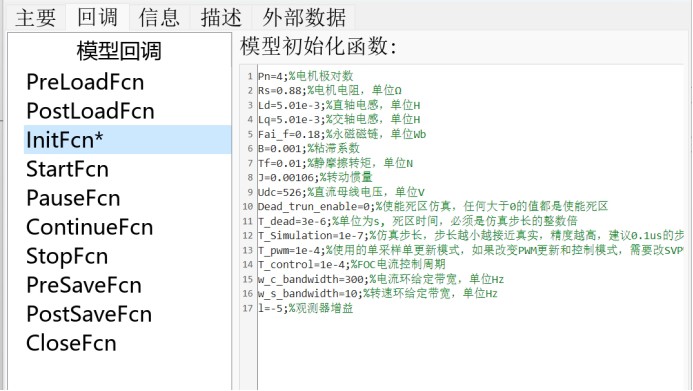
永磁同步电机扰动观测器无位置传感器控制,该方法仅需要根据反电动势估计结果进行一次反正切计算即可得到转子位置,只需要设计一个观测器增益,非常好调试,没有PLL等位置观测器,参数整定简单。永磁同步电机扰动观测器无位置传感器控制,该方法仅需要根据反电动势估计结果进行一次反正切计算即可得到转子位置,只需要设计一个观测器增益,非常好调试,没有PLL等位置观测器,参数整定简单。模型控制器部分全部采用离散域设计
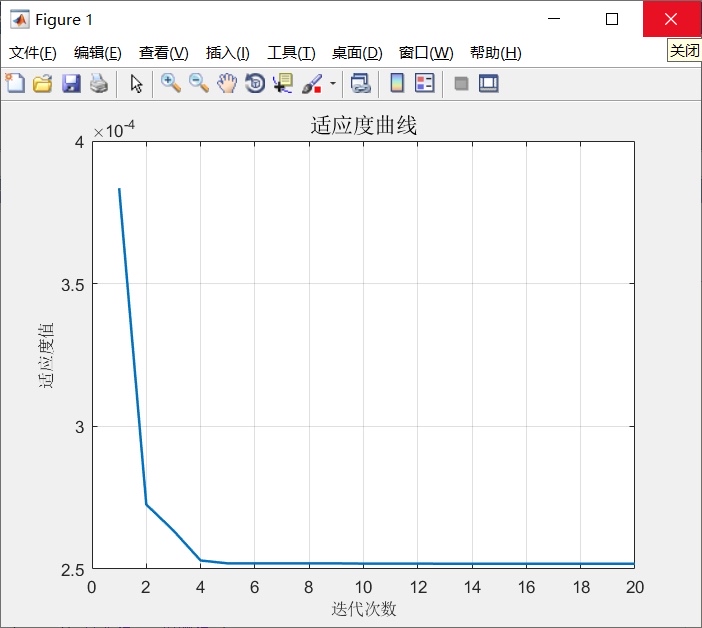
SSA_KELM 麻雀算法优化核极限学习机回归预测算法以及分类预测算法麻雀算法 优化 哈里斯鹰优化 粒子群优化 海鸥优化,黏菌优化,狼群优化,阿基米德算法优化,秃鹰搜索优化 核极限学习机回归算法分类算法matlab代码。可代做在机器学习领域,优化算法和预测模型的结合总是能带来意想不到的惊喜。今天咱们就来唠唠 SSA_KELM,也就是麻雀算法优化核极限学习机,它在回归预测算法以及分类预测算法中都有着
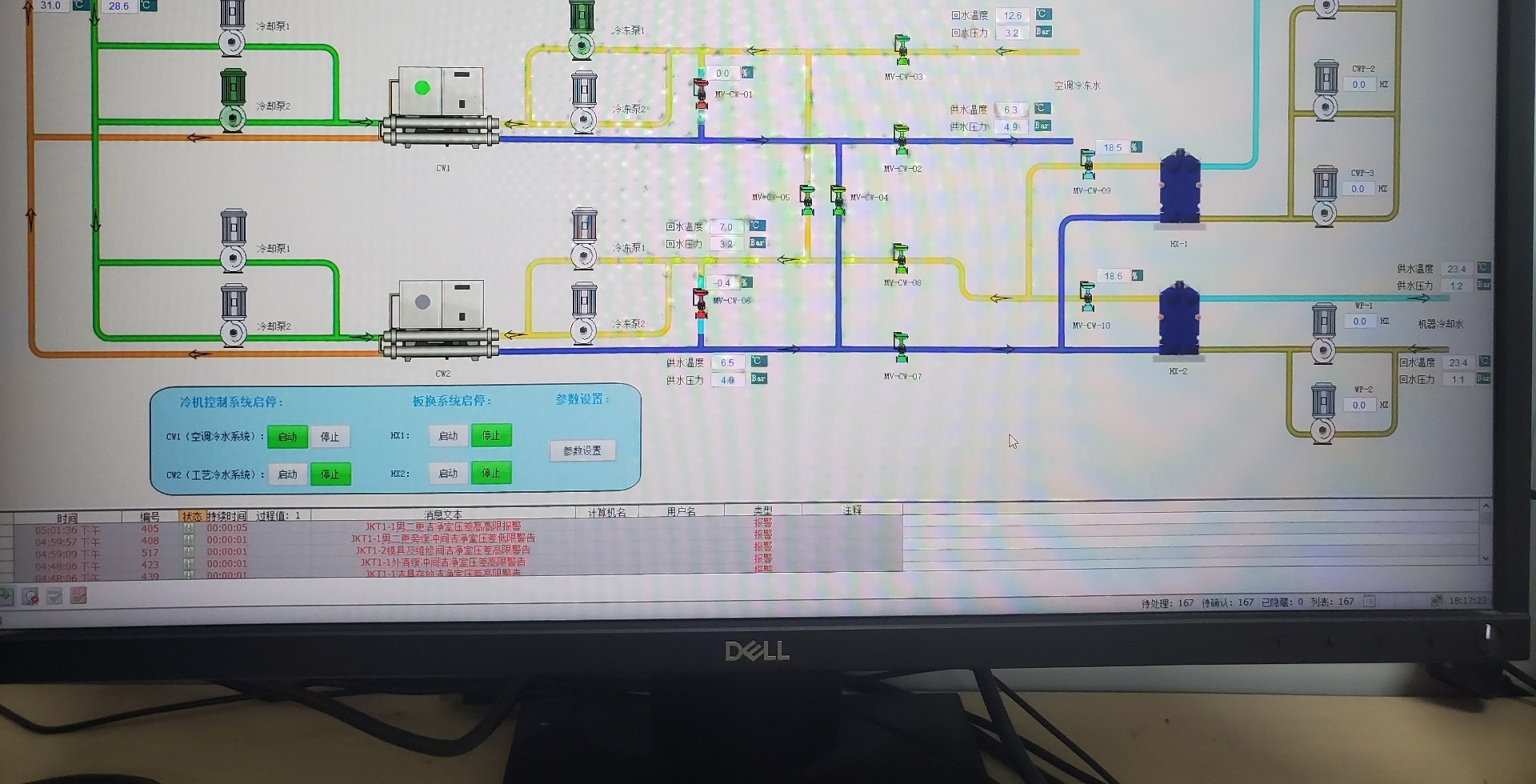
调试时拿手持式温湿度计对比过,在25℃/60%RH工况下,程序计算的焓值与实测值误差在3%以内,够用了。说到焓值计算,程序里的FB8001堪称暖通界的瑞士军刀。还有焓值计算FB块,输入干球温度,干球湿度可自动计算湿球温度,露点温度,含湿量,焓值等等,暖通自控经常会用到;还有焓值计算FB块,输入干球温度,干球湿度可自动计算湿球温度,露点温度,含湿量,焓值等等,暖通自控经常会用到;原系统机组水泵采用一
③《基于虚拟同步发电机的光伏-储能并网系统研究_刘小靖 》:参考光伏储能控制策略搭建的仿真,还有光伏Boost的参数计算和双向Buck-Boost参数计算。③《基于虚拟同步发电机的光伏-储能并网系统研究_刘小靖 》:参考光伏储能控制策略搭建的仿真,还有光伏Boost的参数计算和双向Buck-Boost参数计算。②《虚拟同步发电机并离网切换控制策略研究 高洪献》:搭建的VSG有功转子机械、无功电压环
端点检测是指在语音信号中查找各种段落(如音素、音节、词素)的始点和终点的位置,并从语音信号中消除无声段,进而实现对语音有效信号段的截取。端点检测是指在语音信号中查找各种段落(如音素、音节、词素)的始点和终点的位置,并从语音信号中消除无声段,进而实现对语音有效信号段的截取。过零率像在数语音信号穿越零点的次数,浊音段的过零率通常比清音低。语音信号的端点检测是进行语音识别的一个基本步骤,它是特征训练和识
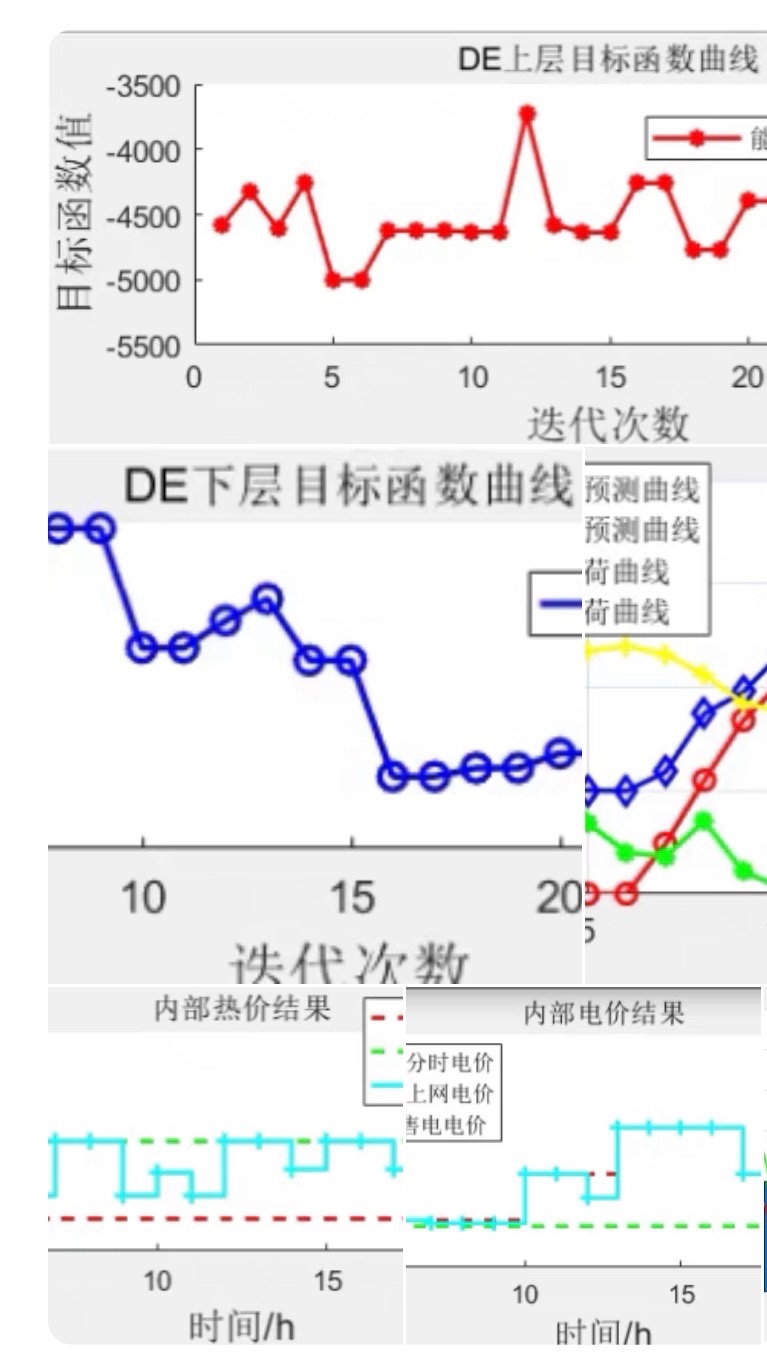
这种主从博弈的奥妙之处在于,上层拍板定价策略时得预判下层的反应,而下层用户又会根据实时价格调整用能计划,整个过程就像俄罗斯套娃般环环相扣。最终输出的阶梯状定价曲线,既保证了运营商收益,又让用户满意度稳定在85%以上,验证了博弈模型的实用性。MATLAB程序代码:基于主从博弈的电热综合能源系统动态定价与能量管理#关键词:博弈,电热综合能源系统,动态定价 能量管理。MATLAB程序代码:基于主从博弈的