- @soft_algorithm
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
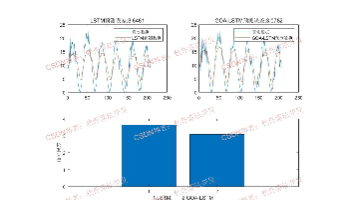
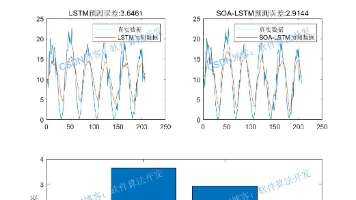
摘要:该研究提出一种基于海鸥优化算法(SOA)改进的LSTM时间序列预测模型(SOA-LSTM)。针对传统LSTM超参数依赖人工调试导致收敛慢、精度低的问题,利用SOA模拟海鸥捕食迁徙的智能行为来自动优化LSTM关键参数(如隐藏层神经元数)。模型在MATLAB环境下实现,通过SOA全局寻优选择最优参数组合,结合LSTM的门控机制处理时序数据的长短期依赖。测试结果表明,SOA-LSTM相比传统LST
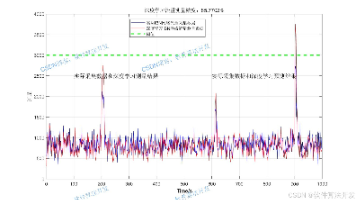
本文介绍了基于LSTM的网络流量测量方法。LSTM通过门控机制有效解决了RNN的梯度消失问题,能够捕捉长时序数据依赖关系。文章详细阐述了LSTM模型的网络结构设计(输入层、LSTM层、全连接层等)、训练流程和评估方法,并给出了MATLAB实现的部分程序代码和运行结果展示。测试结果表明,该方法能够准确预测网络流量,测量精度较高。文中还包含完整的算法理论概述和模型部署应用说明,为网络流量预测和异常检测
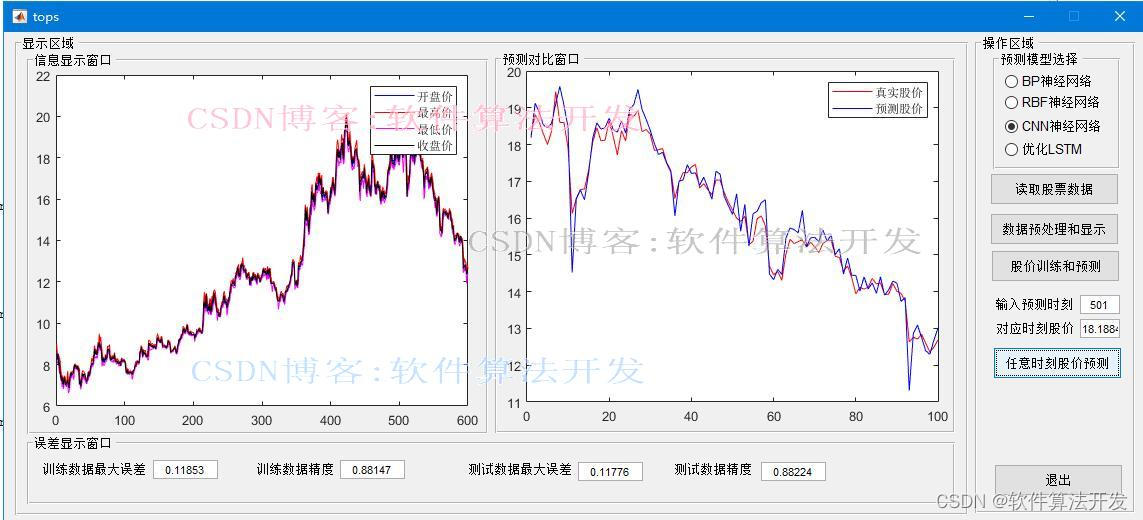
在金融数据预测领域,深度学习技术,特别是卷积神经网络(CNN)、循环神经网络(RNN)的长短期记忆(LSTM)变体、以及传统的机器学习模型如反向传播网络(BP,通常指多层感知器MLP)和径向基函数网络(RBF),都展现出了强大的预测能力。CNN最初设计用于图像处理,但在序列数据和时间序列预测(如金融数据)中也展现出强大能力。LSTM是一种特殊的RNN,专为长序列数据设计,解决了传统RNN梯度消失/
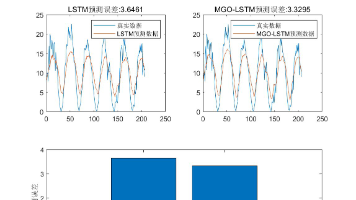
摘要:本文提出一种基于山羚羊优化算法(MGO)的LSTM超参数优化方法,用于时间序列预测。该方法利用MGO自适应搜索LSTM最优隐含层神经元数量,以最小化预测误差。程序在MATLAB2022A/2024B中实现,包含数据预处理、MGO优化、LSTM训练与预测等模块。MGO-LSTM模型通过模拟山羚羊群体智能行为进行全局寻优,克服传统方法的局部最优问题。实验结果显示,该方法能有效提升LSTM预测精度
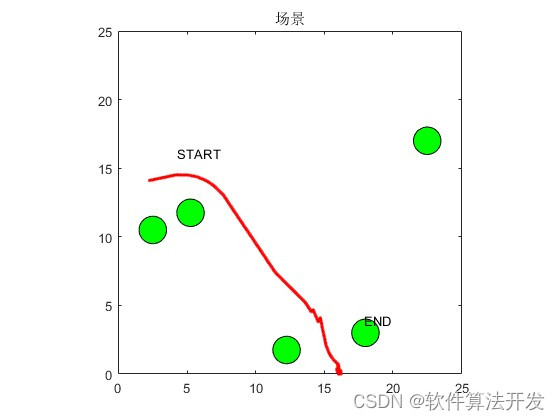
在移动机器人领域,路径规划是一个核心任务,目标是在未知或已知环境中为机器人寻找一条从起始点到目标点的安全、有效且满足特定约束条件(如避障、最短距离等)的路径。数学上,通常将环境表示为一个离散或者连续的空间,并通过图论中的搜索算法来解决。
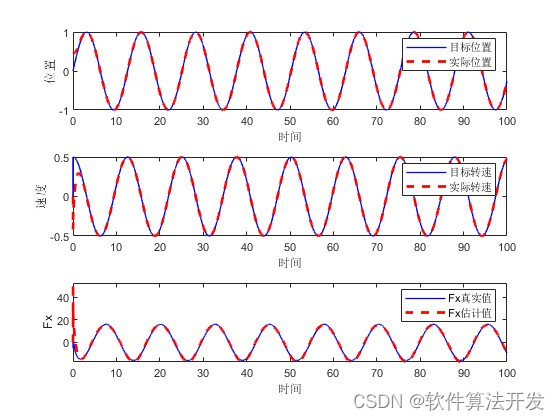
RBF神经网络学习算法需要求解的参数有三个:基函数的中心向量W、方差σ \sigmaσ以及隐含层到输出层的权值。根据选取的径向基函数中心的方法不同,RBF神经网络有不同的学习方式。隐藏层使用径向基函数作为激活函数,常见的径向基函数是高斯函数。在基于RBF神经网络的自适应控制器中,RBF神经网络用于逼近未知的非线性系统动态,而控制器的参数则根据某种自适应律进行在线调整。在simulink中,使用S函
本文介绍了一种基于双向LSTM的文本序列推荐系统。该系统利用双向LSTM网络捕捉文本序列的前后向时序依赖关系,通过词汇嵌入将文本转换为向量表示,并结合推荐任务目标实现精准推荐。文章详细阐述了算法原理、程序功能(包括30轮训练的网络模型实现)和测试环境(MATLAB 2022A/2024B)。该系统能有效解决海量文本信息筛选难题,为用户提供个性化推荐服务。
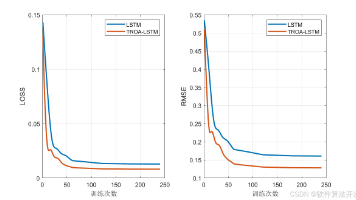
本文提出了一种结合霸王龙优化算法(TROA)与长短期记忆网络(LSTM)的时间序列预测模型TROA-LSTM。该模型利用TROA算法自动优化LSTM的关键超参数(隐藏层神经元数量),解决了人工调参效率低的问题。TROA模拟霸王龙捕食行为,通过迭代更新种群位置来寻找最优参数。优化后的LSTM网络能够有效捕捉时间序列的长期依赖关系,实现精准预测。实验在MATLAB2024B环境下完成,展示了完整的网络
摘要:本文提出了一种BCO-LSTM时间序列预测模型,将边境牧羊犬优化算法(BCO)与长短期记忆网络(LSTM)相结合。该模型利用BCO算法自动优化LSTM的关键超参数(隐藏层神经元数量),解决了人工调参效率低的问题。优化后的LSTM网络能够有效捕捉时间序列的时序依赖特征,实现高精度预测。文中详细介绍了算法原理、程序实现及测试结果,展示了该模型在MATLAB2024B环境下的运行效果。该方法通过智
摘要:本文提出了一种基于瞪羚优化算法(GOA)优化长短期记忆网络(LSTM)的时间序列预测模型(GOA-LSTM)。该模型通过GOA算法自适应优化LSTM关键超参数(隐藏层神经元数量),以解决传统LSTM超参数经验设置的局限性。文章详细介绍了GOA-LSTM的实现流程,包括GOA算法初始化、迭代优化过程(包含探索与开发阶段的位置更新策略)、以及最优参数LSTM模型的构建与训练。实验结果表明,该方法