




- @sjw890821sjw
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
深度解密 HarmonyOS NEXT 6.1 (API 23) Connectivity Kit 在底层无线电通讯方向的重磅升级。本文将通过实战构建「全连接极速适配中控舱」,详细解析 BLE 广播自定义设备名(advertiseName)的防截断机制,以及 Wi-Fi P2P 创建群组时指定频率(goFreq)的频段智选调度策略。

短语音模式(不超过60s)长语音模式(不超过8h)// 创建引擎,通过callback形式返回// 设置创建引擎参数online: 1,// 调用createEngine方法if (!err) {// 接收创建引擎的实例} else {// 无法创建引擎时返回错误码1002200008,原因:引擎正在销毁中});language:语言online:模式,1为离线,目前只支持离线引擎extraPar

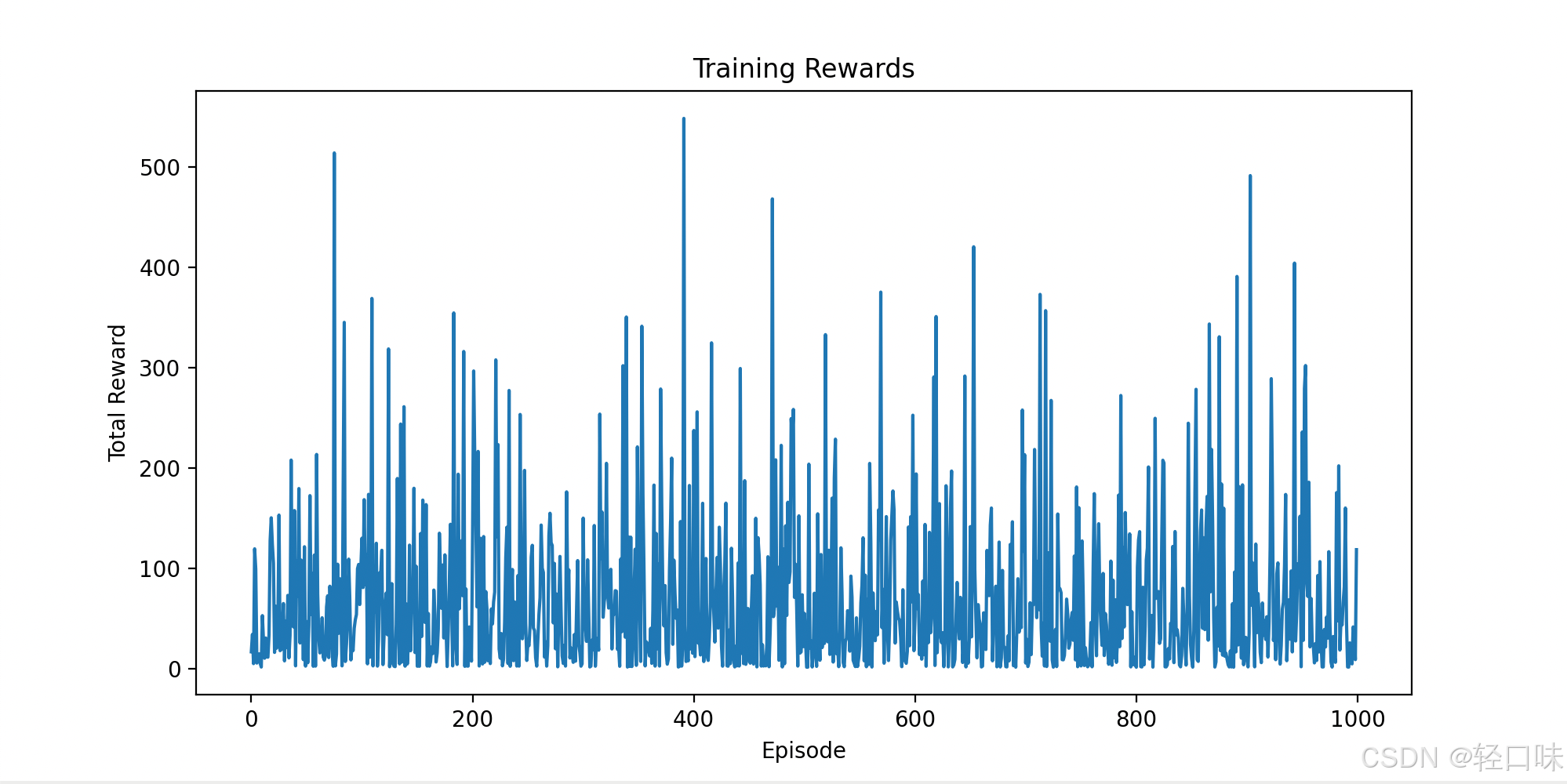
端到端CTC损失和Mel频谱建模技术在语音识别领域展现出了强大的性能和灵活性。通过直接从语音信号到文本输出的建模方式,端到端模型简化了传统语音识别系统的复杂流程,提高了系统的效率和可维护性。CTC损失函数通过自动对齐机制,解决了语音信号与文本输出之间的时间步长不匹配问题,使得模型能够更好地学习序列数据的特征。Mel频谱建模则通过提取语音信号的频率特征,为模型提供了更丰富的信息,有助于提高识别准确率
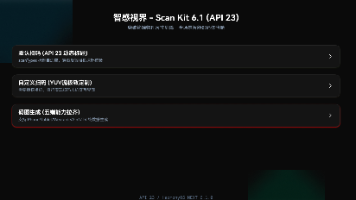
深度解密 HarmonyOS NEXT 6.1.0 (API 23) Scan Kit 的重磅升级特性。手把手带您在复杂多端设备中,攻克带后置相机的智能穿戴设备扫码底座接入、实现默认扫码界面标题根据 scanTypes 的动态展示、详尽剖析扫码直达/默认界面扫码/自定义界面扫码/图像识码及码图生成的全平台设备能力分流,构建高稳健性、体验卓越的全场景智能识码体验舱。
本文介绍了HarmonyOS NEXT 6.1.0中Weather Service Kit的重大升级,重点包括: 支持通过精确GPS坐标获取网格级天气数据; 新增City类实现经纬度到行政区划的逆向反查; 首次在TV设备上原生支持天气服务调用,实现五端统一适配。 文章通过实战项目展示了如何构建跨端天气监测系统,包含经纬度天气检索、地点信息反查和TV大屏适配三大功能模块,帮助开发者突破终端物理壁垒,

本文介绍了HarmonyOS NEXT 6.1.0中Weather Service Kit的重大升级,重点包括: 支持通过精确GPS坐标获取网格级天气数据; 新增City类实现经纬度到行政区划的逆向反查; 首次在TV设备上原生支持天气服务调用,实现五端统一适配。 文章通过实战项目展示了如何构建跨端天气监测系统,包含经纬度天气检索、地点信息反查和TV大屏适配三大功能模块,帮助开发者突破终端物理壁垒,
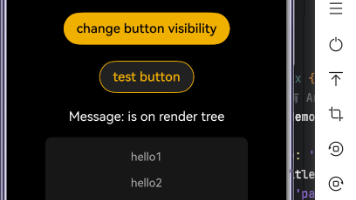
摘要: HarmonyOS 6.1引入的isInRenderState()接口为ArkUI开发提供了物理渲染状态的精准感知能力,解决了传统方法无法判断组件是否实际渲染的问题。该接口通过底层渲染管线检测节点是否处于活跃渲染树,适用于长列表离屏优化、动画资源释放等场景,显著提升UI流畅度并降低系统能耗。文章详细解析了其工作原理、API特性及实战应用,展示了如何通过状态监听实现高性能渲染优化。
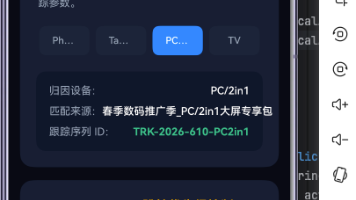
HarmonyOS 6.1 引入全新流量增长引擎,通过AppGallery归因服务和AppLinking深度链接实现全场景精准分发。关键特性包括:无标识符隐私归因覆盖PC/TV设备、双向域名校验安全跳转、优先级权重控制(index参数)实现极速直达、延迟链接支持PC端无缝激活。采用三层架构设计(生命周期感知层、全局状态层、路由交互层)确保高性能转化,助力企业构建合规高效的流量闭环增长系统。
HarmonyOS 6.1的Ability Kit迎来重大升级,聚焦四大核心能力:1)新增buildVersion字段实现同版本多构建包的精准区分;2)支持Native软件包独立签名,大幅降低模块化更新成本;3)通过launchUTCTime/launchUptime提供毫秒级冷启动性能分析;4)扩展AppGallery归因服务至TV/PC等大屏设备。这些改进解决了企业级开发中的版本管理、性能优化
HarmonyOS 6.1的Ability Kit迎来重大升级,聚焦四大核心能力:1)新增buildVersion字段实现同版本多构建包的精准区分;2)支持Native软件包独立签名,大幅降低模块化更新成本;3)通过launchUTCTime/launchUptime提供毫秒级冷启动性能分析;4)扩展AppGallery归因服务至TV/PC等大屏设备。这些改进解决了企业级开发中的版本管理、性能优化