




- @simulacra_
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
相机标定主要是为了获取左右相机的内参矩阵、畸变系数、旋转矩阵和平移向量,方便后续对获得的图像进行畸变矫正和图像对齐。是描述相机内在参数的3x3矩阵,包含了相机的焦距和光学中心的位置。这些参数定义了相机的成像过程中的投影关系,内参矩阵一般表示为:其中:fx 和 fy 是焦距(以像素为单位),分别对应x和y方向。cx 和 cy 是光学中心(主点),即图像的中心点。s称为视向畸变系数,它用于校正图像中的

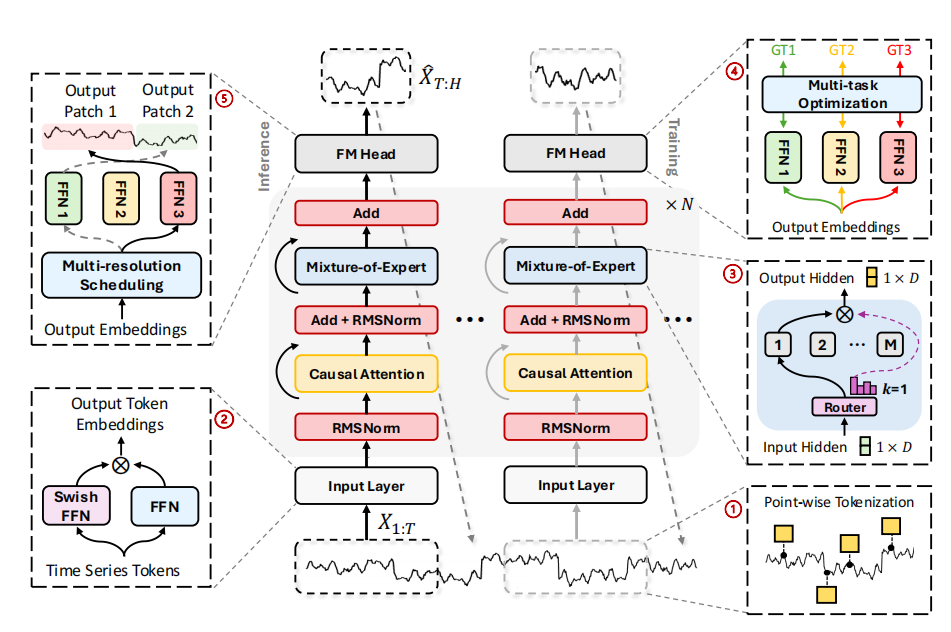
每个预测层将输出形状为 (batch_size, seq_length, input_size * horizon_length),其中 input_size 是每个时间步的输入特征维度,horizon_length 是预测的未来步数。hidden_states 在通过解码器层之后,将进入归一化层对最后的隐藏状态进行规范化处理,以提高训练稳定性并加速收敛,得到形状为 (batch_size, se
每个预测层将输出形状为 (batch_size, seq_length, input_size * horizon_length),其中 input_size 是每个时间步的输入特征维度,horizon_length 是预测的未来步数。hidden_states 在通过解码器层之后,将进入归一化层对最后的隐藏状态进行规范化处理,以提高训练稳定性并加速收敛,得到形状为 (batch_size, se
每个预测层将输出形状为 (batch_size, seq_length, input_size * horizon_length),其中 input_size 是每个时间步的输入特征维度,horizon_length 是预测的未来步数。hidden_states 在通过解码器层之后,将进入归一化层对最后的隐藏状态进行规范化处理,以提高训练稳定性并加速收敛,得到形状为 (batch_size, se
每个预测层将输出形状为 (batch_size, seq_length, input_size * horizon_length),其中 input_size 是每个时间步的输入特征维度,horizon_length 是预测的未来步数。hidden_states 在通过解码器层之后,将进入归一化层对最后的隐藏状态进行规范化处理,以提高训练稳定性并加速收敛,得到形状为 (batch_size, se