
写文章




- @shsh0810
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
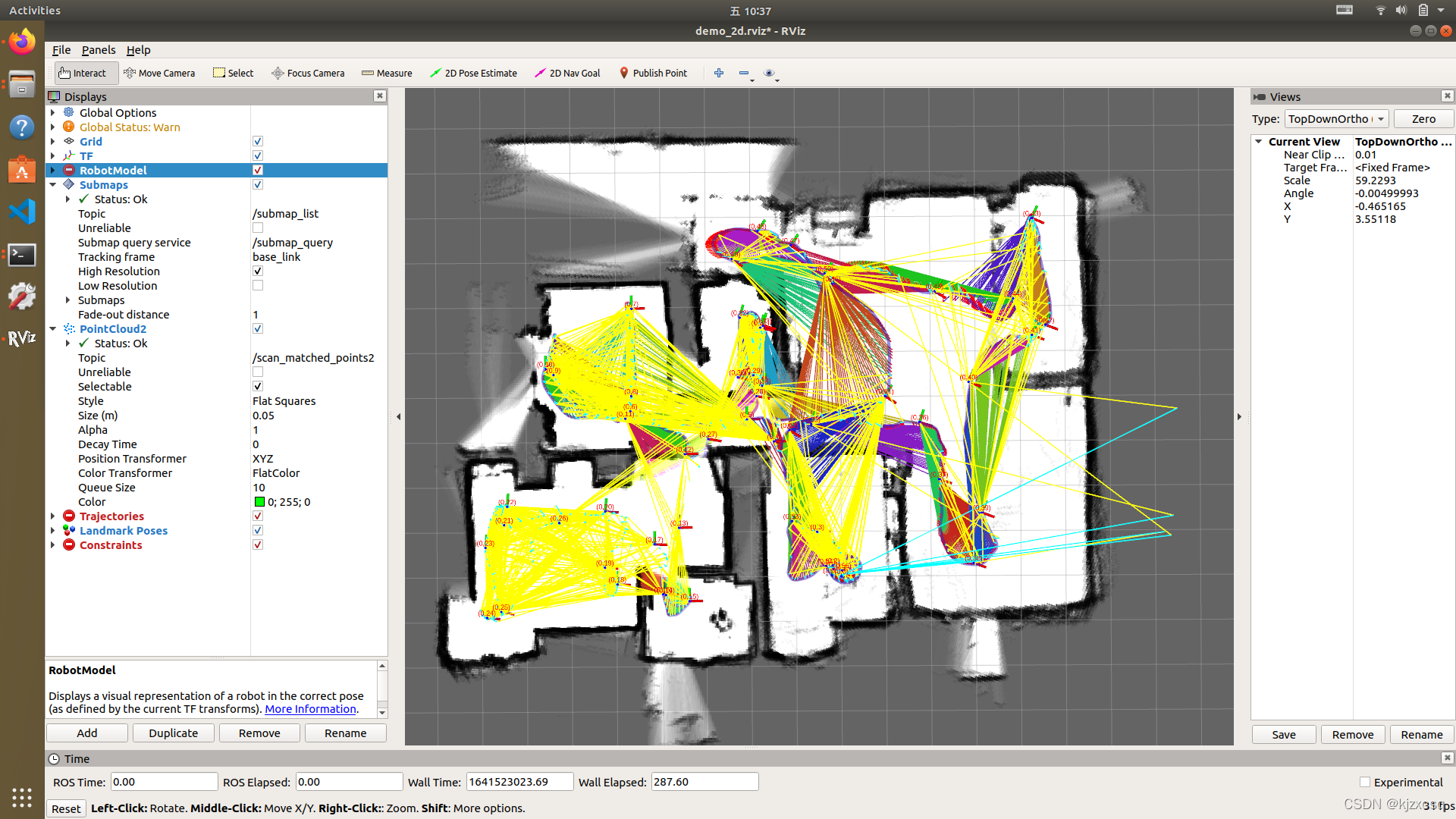
思岚激光雷达+cartographer建图
思岚+cartographer
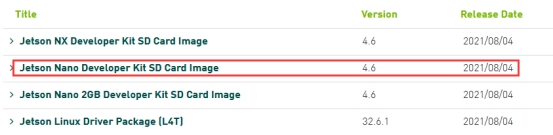
使用Jetson Nano向PX4提供T265位置信息,实现室内定点飞行
ROS+Realsense+PX4+T265
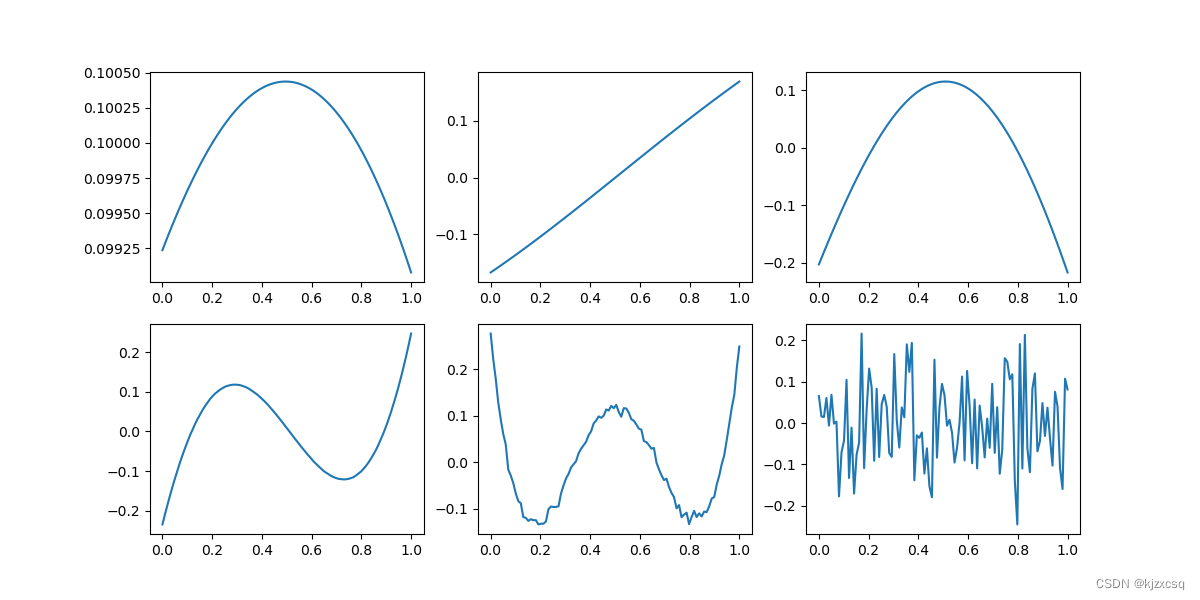
使用PyTorch+functorch计算并可视化NTK矩阵
使用PyTorch+functorch计算并可视化NTK矩阵
到底了
该用户还未填写简介
暂无可提供的服务
思岚+cartographer
ROS+Realsense+PX4+T265
使用PyTorch+functorch计算并可视化NTK矩阵