




- @qq_73966123
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
文章指出智能体的决策由三个因素决定,自我动力,瞬时意图和社会交互,而社会交互则是当前的重点,近年主要通过空间中心机制,注意力机制,图来进行建模但仍然存在局限性:首先,没有考虑群体行为,如海洋鱼群躲避捕食者,NBA团队合作其次,交互关系会随时间变化,如群体内部的关系最后,目前大多只推理交互类别,没有交互强度在过去的轨迹预测中(GroupNet)主要考虑多智能体间静态的交互关系,因此提出DynGrou
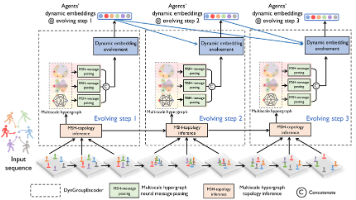
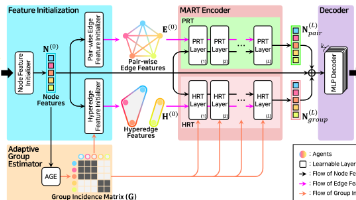
多智能体轨迹预测大多依赖于GNN,图transformer,超图神经网络,基于超图的还有待研究,因此提出一个多尺度的交互transformer网络(MART),可以在transformer中考虑个体和群体的行为。
自动驾驶的挑战在于智能体的多样交互和复杂的环境场景大多通过MLP编码的工作通常偏向于预测训练数据中观察到的最常发生的模式,从而产生无法充分提取智能体的多模式行为的同一轨迹因此有方法为了改进涵盖智能体潜在未来行为的轨迹预测,提出一种基于目标的策略,首先选出密集的候选目标作为智能体的目的地,通过预测每个候选目标作为实际目的地相关的概率,为每个选定的候选目标生成完整轨迹。虽然这种策略减少了模型优化期间轨

文章指出智能体的决策由三个因素决定,自我动力,瞬时意图和社会交互,而社会交互则是当前的重点,近年主要通过空间中心机制,注意力机制,图来进行建模但仍然存在局限性:首先,没有考虑群体行为,如海洋鱼群躲避捕食者,NBA团队合作其次,交互关系会随时间变化,如群体内部的关系最后,目前大多只推理交互类别,没有交互强度在过去的轨迹预测中(GroupNet)主要考虑多智能体间静态的交互关系,因此提出DynGrou
Association IoU,通过将预测检测和地面实况检测匹配在一起(如匈牙利匹配)并测量该预测检测的整个轨迹与地面实况检测的整个轨迹之间的对齐情况来衡量,真阳性关联(TPA)为两条轨道之间的交集可以测量为两条轨道之间的真阳性匹配次数,误报关联 (FPA)是预测轨迹中的任何剩余检测,假阴性关联 (FNA)是真值轨迹中的任何剩余检测。Det-IoU为Detection IoU,需要定义一个定位阈值

Association IoU,通过将预测检测和地面实况检测匹配在一起(如匈牙利匹配)并测量该预测检测的整个轨迹与地面实况检测的整个轨迹之间的对齐情况来衡量,真阳性关联(TPA)为两条轨道之间的交集可以测量为两条轨道之间的真阳性匹配次数,误报关联 (FPA)是预测轨迹中的任何剩余检测,假阴性关联 (FNA)是真值轨迹中的任何剩余检测。Det-IoU为Detection IoU,需要定义一个定位阈值