




- @qq_63786784
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
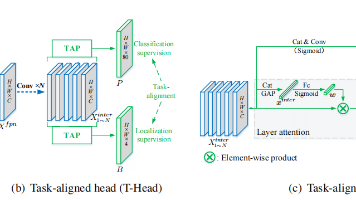
本文系统对比了目标检测领域的两大流派:两阶段算法(以Faster R-CNN为代表)和一阶段算法(以TOOD和YOLOv8为例)。Faster R-CNN通过RPN和检测头的两阶段设计实现高精度检测,但速度较慢;TOOD创新性地提出任务对齐头,解决了一阶段算法分类与定位错位的问题;YOLOv8则在速度、精度和工程化上取得平衡,成为工业落地首选。文章从架构范式、任务设计、锚框机制等维度深入分析,并给
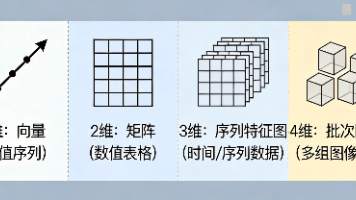
深度学习中的维度是张量的核心指标,包含两层含义:轴数(张量的组织轴数量)和单轴维度大小(轴上元素数量)。维度决定了数据形态,从0维标量到5维视频序列,不同维度的张量适用于不同任务。在CV和NLP中,维度承载着批次、通道、空间、序列等关键信息,直接影响模型的特征表达能力和计算效率。维度设计需要平衡精度与计算量,通过降维、升维等操作优化性能。常见维度报错源于形状不匹配、轴顺序错误或维度数不符,需通过检
本文系统对比了目标检测领域的两大流派:两阶段算法(以Faster R-CNN为代表)和一阶段算法(以TOOD和YOLOv8为例)。Faster R-CNN通过RPN和检测头的两阶段设计实现高精度检测,但速度较慢;TOOD创新性地提出任务对齐头,解决了一阶段算法分类与定位错位的问题;YOLOv8则在速度、精度和工程化上取得平衡,成为工业落地首选。文章从架构范式、任务设计、锚框机制等维度深入分析,并给
深度学习中的维度是张量的核心指标,包含两层含义:轴数(张量的组织轴数量)和单轴维度大小(轴上元素数量)。维度决定了数据形态,从0维标量到5维视频序列,不同维度的张量适用于不同任务。在CV和NLP中,维度承载着批次、通道、空间、序列等关键信息,直接影响模型的特征表达能力和计算效率。维度设计需要平衡精度与计算量,通过降维、升维等操作优化性能。常见维度报错源于形状不匹配、轴顺序错误或维度数不符,需通过检
《Dr.Occ:基于深度和区域引导的自动驾驶环视3D语义占用预测》提出了一种创新的端到端解决方案,针对现有纯视觉方案的两大痛点:几何特征错位和语义长尾识别困难。该方法包含两个核心模块:D2-VFormer通过深度引导的双投影视图变换实现精准几何对齐,R2-EFormer采用区域引导的递归专家Transformer优化语义识别。实验表明,该方法在Occ3D-nuScenes基准上显著提升性能(mIo
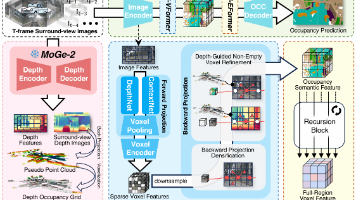
自动驾驶3D语义占据预测技术正从二维向三维空间演进,以解决传统3D目标检测在描述不规则障碍物时的缺陷。针对3D体素数量剧增和场景稀疏性(90%以上为空)的挑战,三种代表性VoxFormer、SparseOcc和OccupancyDETR模型提出不同解决方案。
