
写文章




- @qq_53909832
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
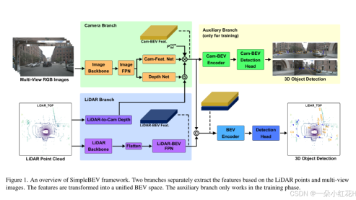
SimpleBEV:改进的激光雷达-摄像头融合架构用于三维目标检测
越来越多的研究工作将激光雷达(LiDAR)与摄像头信息进行融合,以提升自动驾驶系统的三维目标检测性能。近期,一种简单而高效的融合框架在三维目标检测上取得了优异的性能,该框架在统一的鸟瞰图(BEV, Bird’s-Eye-View)空间中融合了激光雷达与摄像头特征。本文提出了一种名为 SimpleBEV 的激光雷达-摄像头融合框架,用于高精度的三维目标检测。该方法遵循基于 BEV 的融合范式,并分别
[论文阅读]KD——神经网络中的知识提取(知识蒸馏)
提高几乎任何机器学习算法性能的一个非常简单的方法是在相同的数据上训练许多不同的模型,然后对它们的预测进行平均[Ensemble methods in machine learning]。不幸的是,使用整个模型集合进行预测是很麻烦的,而且计算开销太大,不允许部署到大量用户,尤其是如果单个模型是大型神经网络。[Model compression]已经表明,将集合中的知识压缩到一个更容易部署的单一模型是
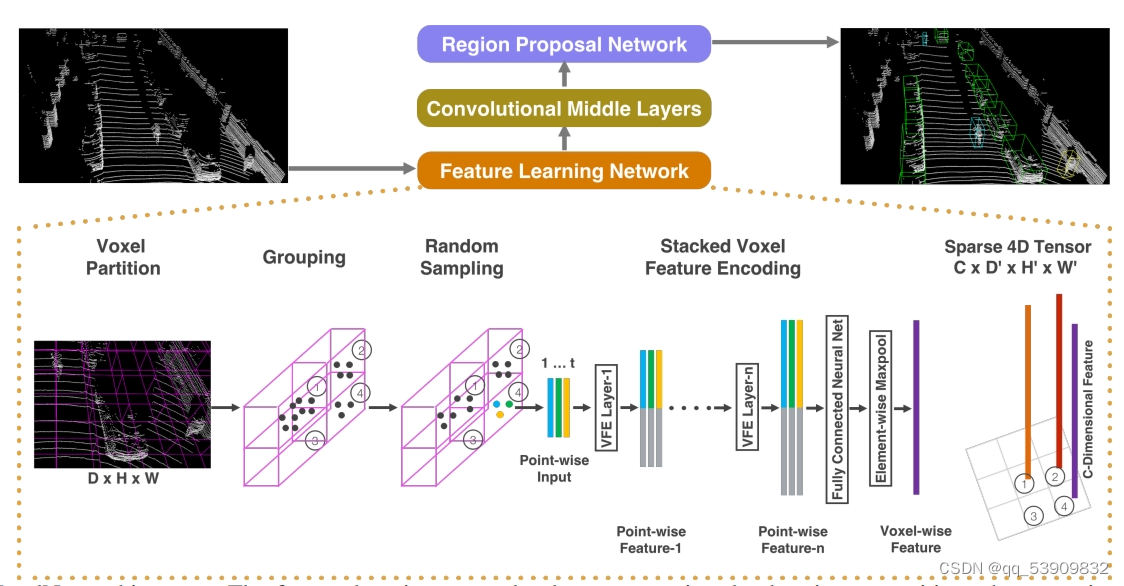
[论文阅读]VoxelNet——基于点云的三维物体检测的端到端学习
VoxelNet论文阅读
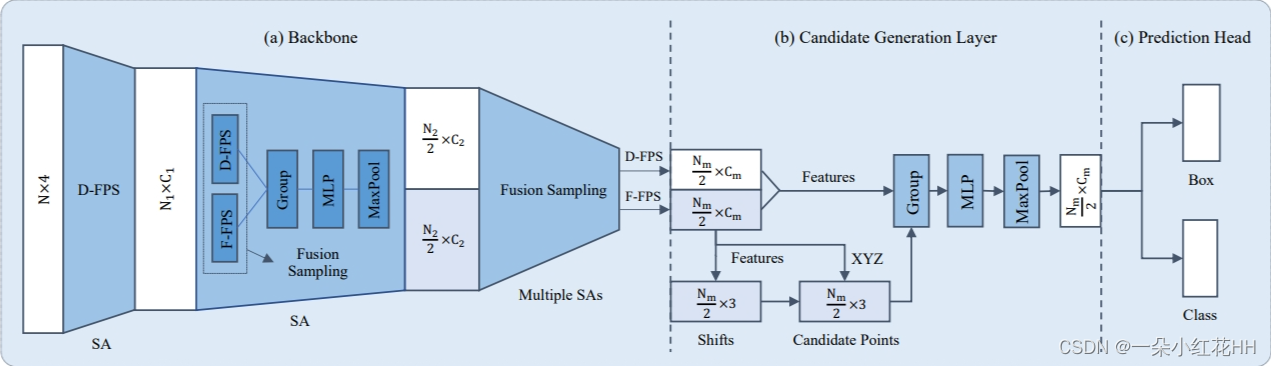
[论文阅读]3DSSD——基于Point的三维单阶段目标检测器
3DSSD论文阅读
[论文阅读]KD——神经网络中的知识提取(知识蒸馏)
提高几乎任何机器学习算法性能的一个非常简单的方法是在相同的数据上训练许多不同的模型,然后对它们的预测进行平均[Ensemble methods in machine learning]。不幸的是,使用整个模型集合进行预测是很麻烦的,而且计算开销太大,不允许部署到大量用户,尤其是如果单个模型是大型神经网络。[Model compression]已经表明,将集合中的知识压缩到一个更容易部署的单一模型是
到底了