
写文章




- @qq_53708729
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
气压计传感器测高原理
公式来源于论文中的推导,侵权立删。
读书笔记:详解FPGA人工智能的驱动引擎(石侃)
最近读了一本关于我偶像的一本书,知名up主老石的一本书《详解FPGA人工智能的驱动引擎》
ROS2能编译成功但是找不到功能包
ls -la ~/yobotics_sdk-master/ros2_ws/install/yobotics_msgs/share/ament_index/resource_index/packages/文件存在但是是空的。索引文件存在但是空的,这就是为什么 ros2 pkg list 找不到功能包的原因。package.xml 缺少了关键的 <export> 标签。package.xml 缺少了关
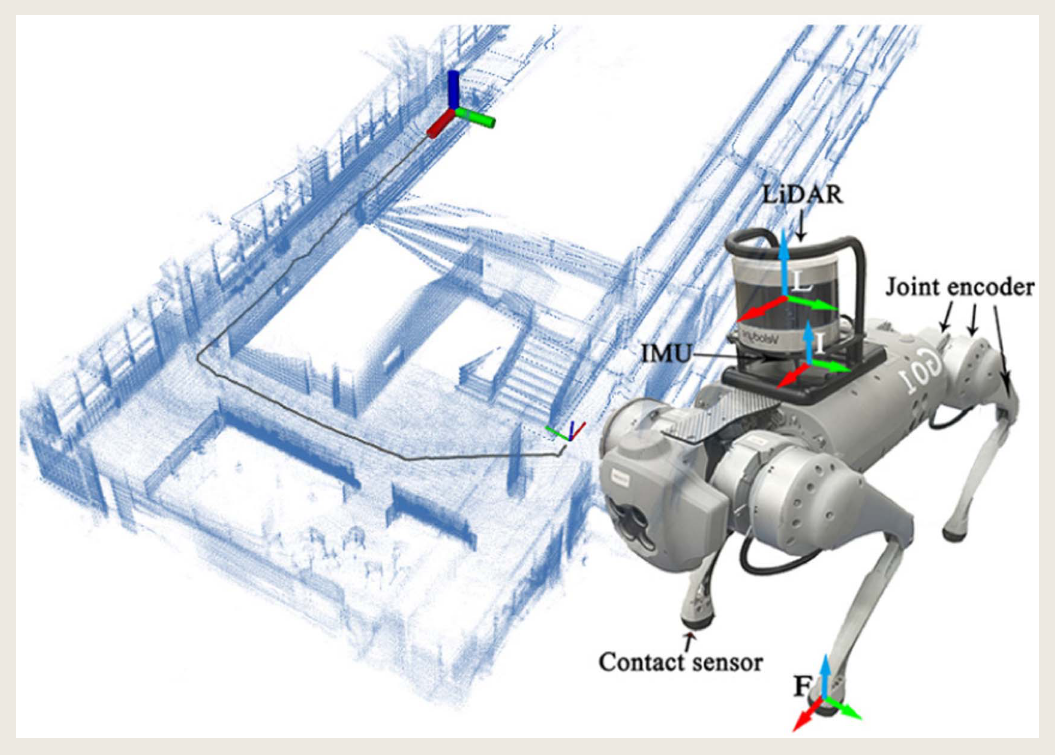
Leg-KILO: Robust Kinematic-Inertial-Lidar Odometry for Dynamic Legged Robots论文复现
本信件提出了一种稳健的多传感器融合框架,Leg-KILO(运动-惯性-激光里程计)。当基于激光雷达的SLAM应用于腿式机器人时,高动态运动(例如,跑步步态)会导致频繁的脚部冲击,从而导致IMU退化和激光雷达运动失真。直接使用IMU测量可能会导致显著的漂移,特别是在z轴方向。为了解决这些局限性,我们基于图最优化紧密耦合了腿部里程计、激光雷达里程计和环闭合模块。对于腿部里程计,我们提出了一种使用流形上
读书笔记:详解FPGA人工智能的驱动引擎(石侃)
最近读了一本关于我偶像的一本书,知名up主老石的一本书《详解FPGA人工智能的驱动引擎》
到底了