
写文章




- @qq_53004665
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
SLAM常用的2D、3D算法复现以及仿真汇总
1.2 Cartographer(2D)算法。2.3 Cartographer(3D)算法。0.2 搭建turlebot3小车仿真环境。2.2 Lego-LOAM算法。1.1 Gmapping算法。2.1 A-LOAM算法。1.SLAM 2D算法。2.SLAM 3D算法。
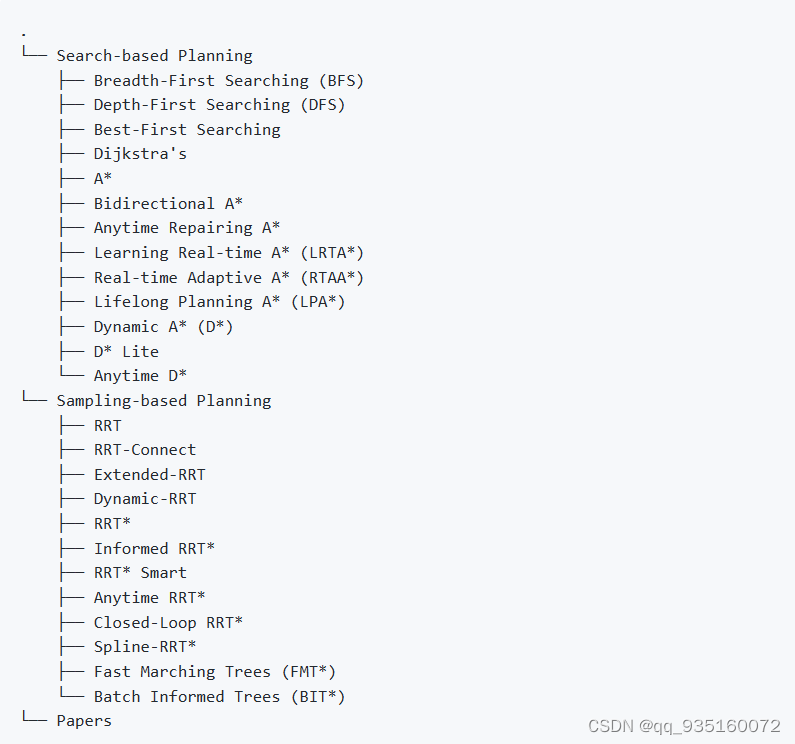
RRT、RRT-connect、RRT*等算法、A*等等路径规划算法
路径规划算法python代码
搭建一个完整的3D SLAM导航小车
在 turtlebot3_simulations/turtlebot3_gazebo/launch下创建自己的tur_3d.launch文件(红色)并将turtlebot3_house.launch的内容复制到自己的launch文件中。3D雷达和小车已经成功组合在一起了,由于我是设置的雷达在base_link的高度上方4的距离所以会出现浮空的样子,但是绑定了小车base_link雷达可以跟随一起运
到底了