




- @qq_45445740
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
c++: fatal error: Killed signal terminated program cc1plus
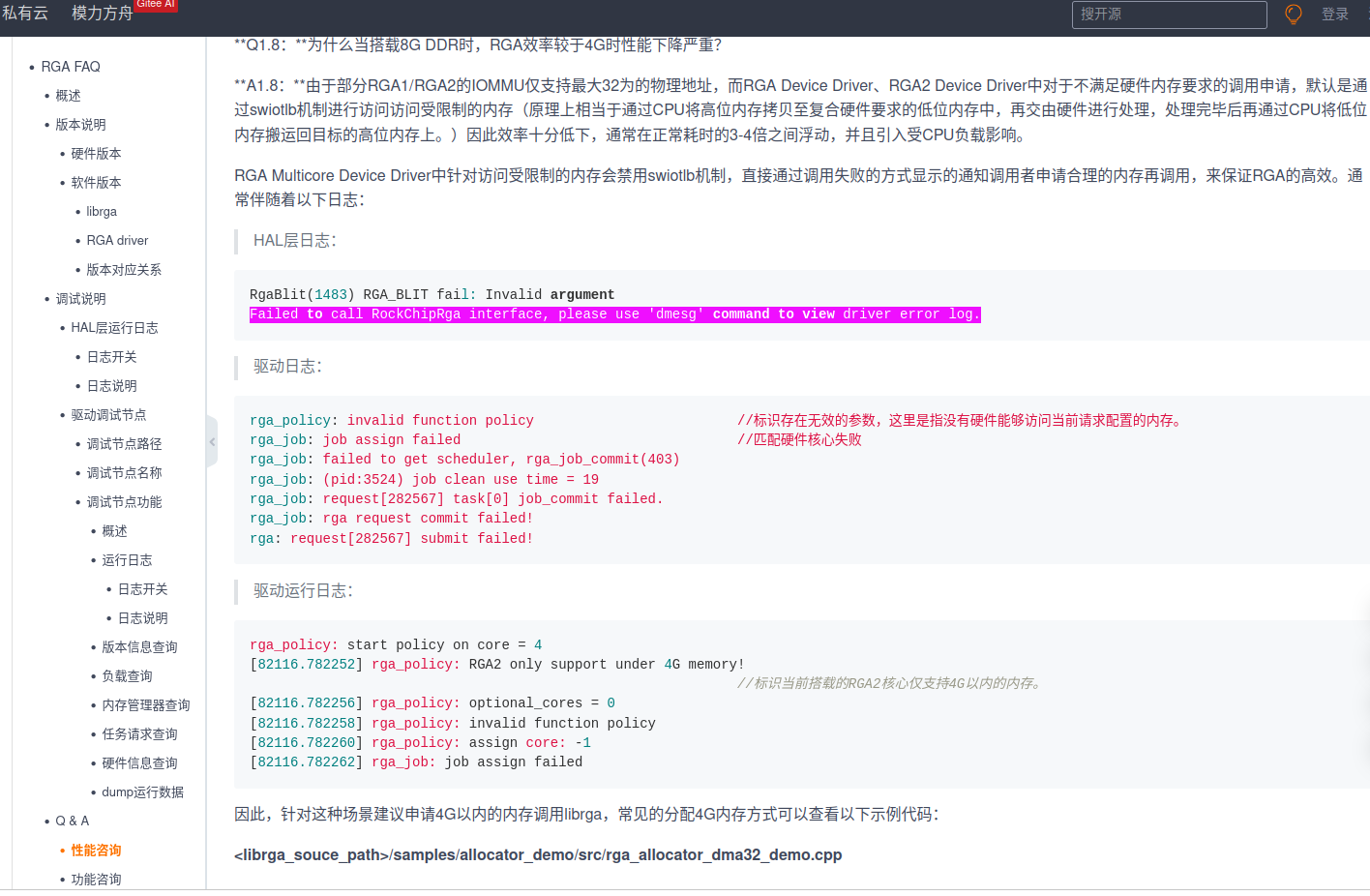
rk3588开发板部署yolov8-seg模型报错:Failed to call RockChipRga interface, please use ‘dmesg’ command to view driver error log.
滑动条往下拉,可以看到。在BIOS设置中,将“

最近在做视觉应用开发,有个需求需要实时获取当前识别到的位姿点位是否有突变,从而确认是否是视觉算法的问题,发现Python的Matplotlib进行绘制比较方便。

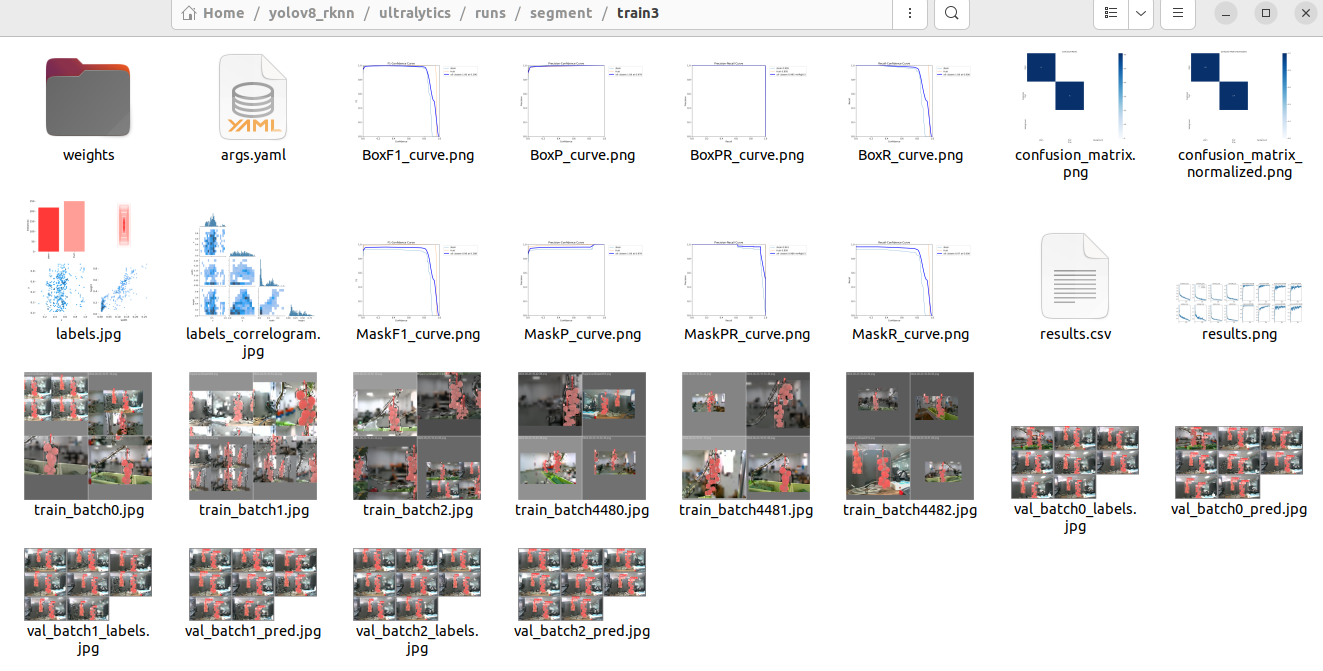
在YOLOv8模型进行训练之后,会在/runs目录下生成训练结果,其中会生成相应的权重文件、图表、图像等。
首先应该对两个点云进行一个去质心的操作,然后将去质心以后的对应点相乘,对前N项进行一个求和,得到一个3x3的矩阵,再对这个矩阵进行奇异值分解,将奇异值分解以后得到的矩阵V乘以矩阵U的转置,得到我们想要的旋转矩阵R,再把这个R代入到一个公式中,用CQ减去R乘以CP得到了平移矩阵t。1.首先准备一个标定板(这里以棋盘格标定板为例),将其放置于相机视野内的任何一个地方,放置之后用相机来拍摄这个标定板,获
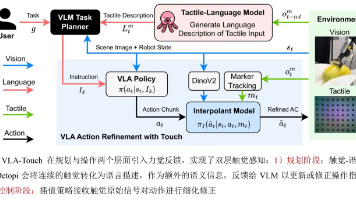
双层级触觉反馈可同时提升VLA模型的规划效率与操控精度,语言化触觉表示更适配VLM,插值扩散控制器优于传统残差控制器。
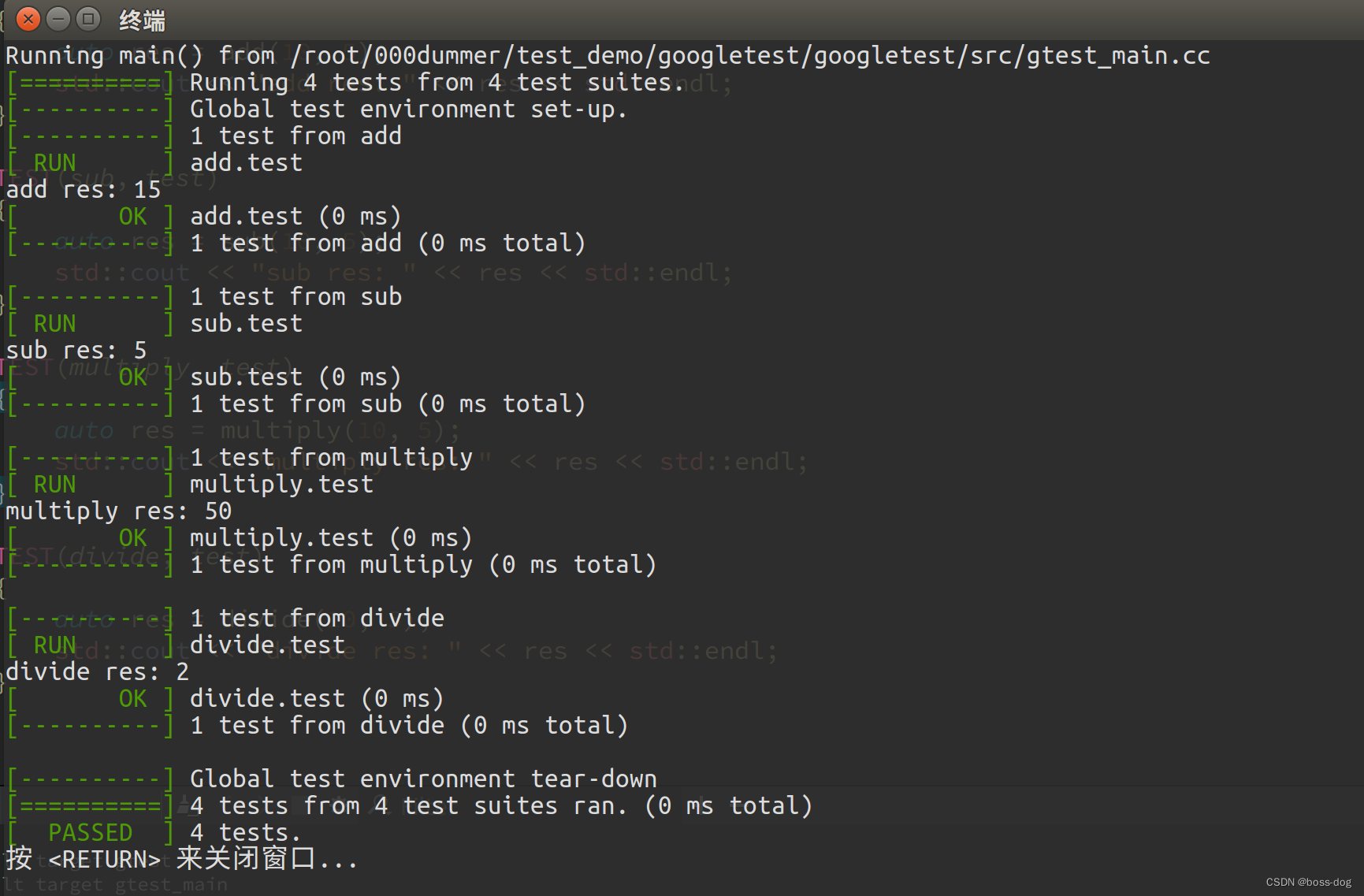
单元测试可以帮助开发人员验证代码的正确性和提高代码的可维护性,确保代码的稳定性和可靠性。
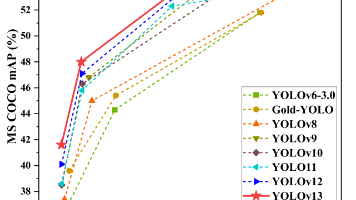
就很快,yolov13来了。。。
如果 lspci 指令中可以搜索到无线网卡,但 iwconfig 却找不到无线网卡,则大概率是没有安装 RTL8822CE驱动。