- @qq_45252077
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
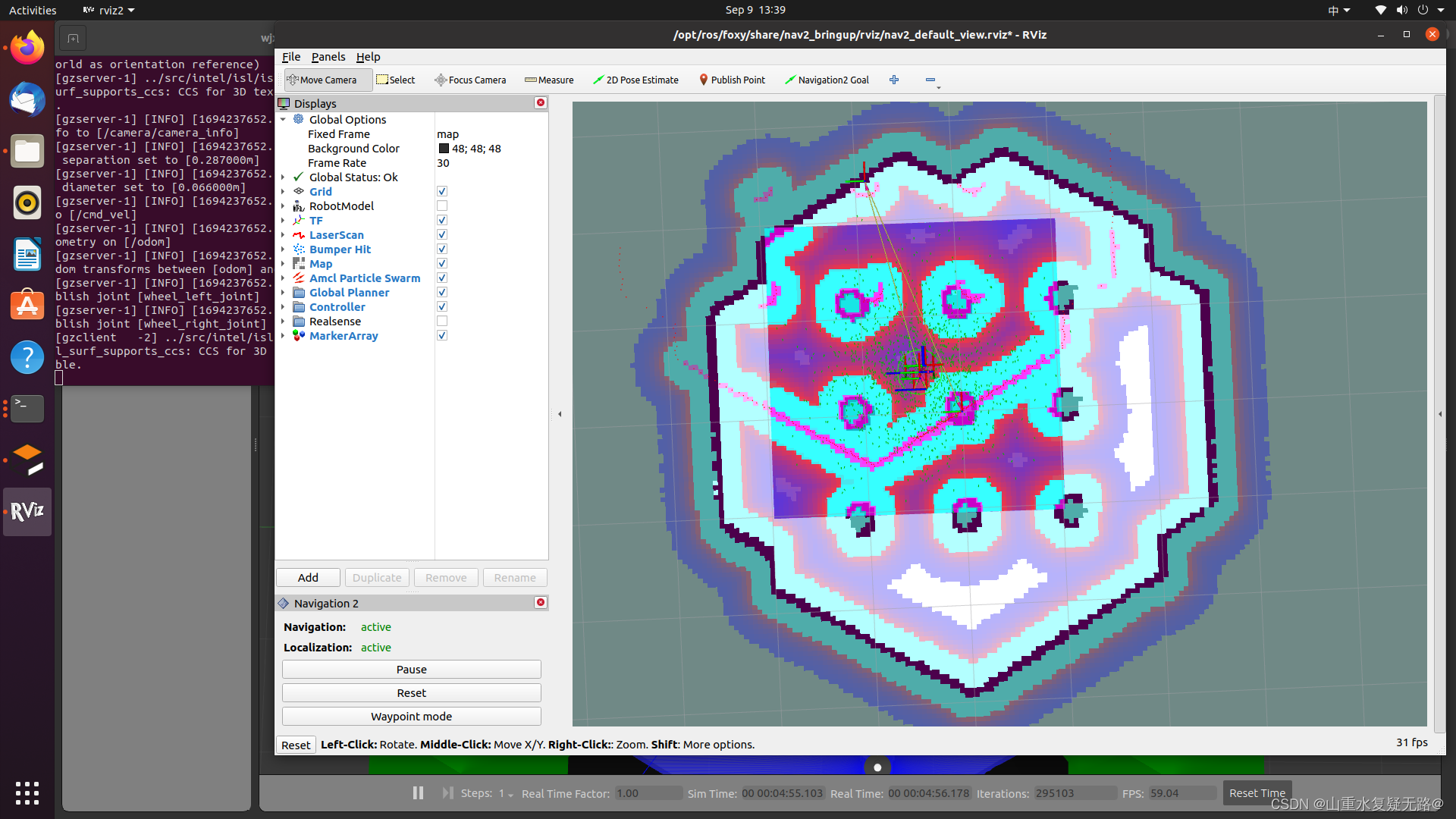
在使用台式机进行仿真时,大部分例程很顺利,但在SLAM导航时,在RVIZ中却一直加载不出机器人模型,点击Navigation2 Goal选择目标点进行导航时,无响应。启动后在RVIZ2和终端看到一个错误按照官网的指令试了多次,一直无法加载,在网上赵的解决方案都是修改RVIZ里的各种设置(Global Options、Fixed Frame等)试了很多但仍无法解决。
近期实验室购置了阿木实验室KKSwarm集群仿真平台,其整体开放环境为MATLAB,近期基于该平台做了一些集群编队的工作,期间遇到了一些小问题,记录下遇到的问题和解决方法。最终借助MATLAB强大的数据分析功能绘制出,预期的图形:因为才开始学习使用Matlab还用许多不清楚的地方,故记录下遇到的问题供以后温故知新!

Step7编程语言与编程概述&结构
今天闲的没事,正好是10/24,CSDN有活动,就把之前做的一些多机器人编队避障算法(主要是纯控制避障)梳理小结下( •̀ ω •́ )✧这两种方法都存在较大的问题,也简单的尝试了将这两种方法应用于多机器人编队中,但结果远远低于预期,两种方法存在相同的缺陷,在编队行进过程中一旦遇到障碍物,编队就离散后面也很难继续保持编队前进。

文章目录前言一、车牌识别背景资料简介二、实现车牌识别步骤1.图像采集(Image Correction)2.角度修正(Angle Correction)3.字符分割第一次分割4.车牌定位(License Plate Location)5.字符分割第二次分割6.字符识别(Character recognition)总结前言经过几周繁忙的学习,这两周变得清闲了起来O(∩_∩)O,上上周在我去上海参加培
基于ROS的slam 地图构建与navigation 自主导航一、slam 地图构建一、实验原理1.1slam算法安装ros-indigo-slam-gmapping是 ros平台激光 slam算法之一,在使用LIAOKE机器人做地图构建事先要安装该算法。终端输入命令:$ sudo apt-get install ros-indigo-slam-gmapping 进行slam算法安装;1.2程序包
记录下将fast_planner规划算法应用到Turtlebot3机器人过程中遇到的思路和一些问题。由于实机和仿真中的机器人传感器等硬件不同,在一开始并不能确定怎样才能将仿真中的效果作用到实机,就不断的想出新的思路尝试着实现,但大部分想法做着做着由于遇到当前无法解决的问题而放弃,目前实现的思路可能不是最理想的,但一定是最简便的。fast_planner感知深度信息构建地图,但turtlebot3实
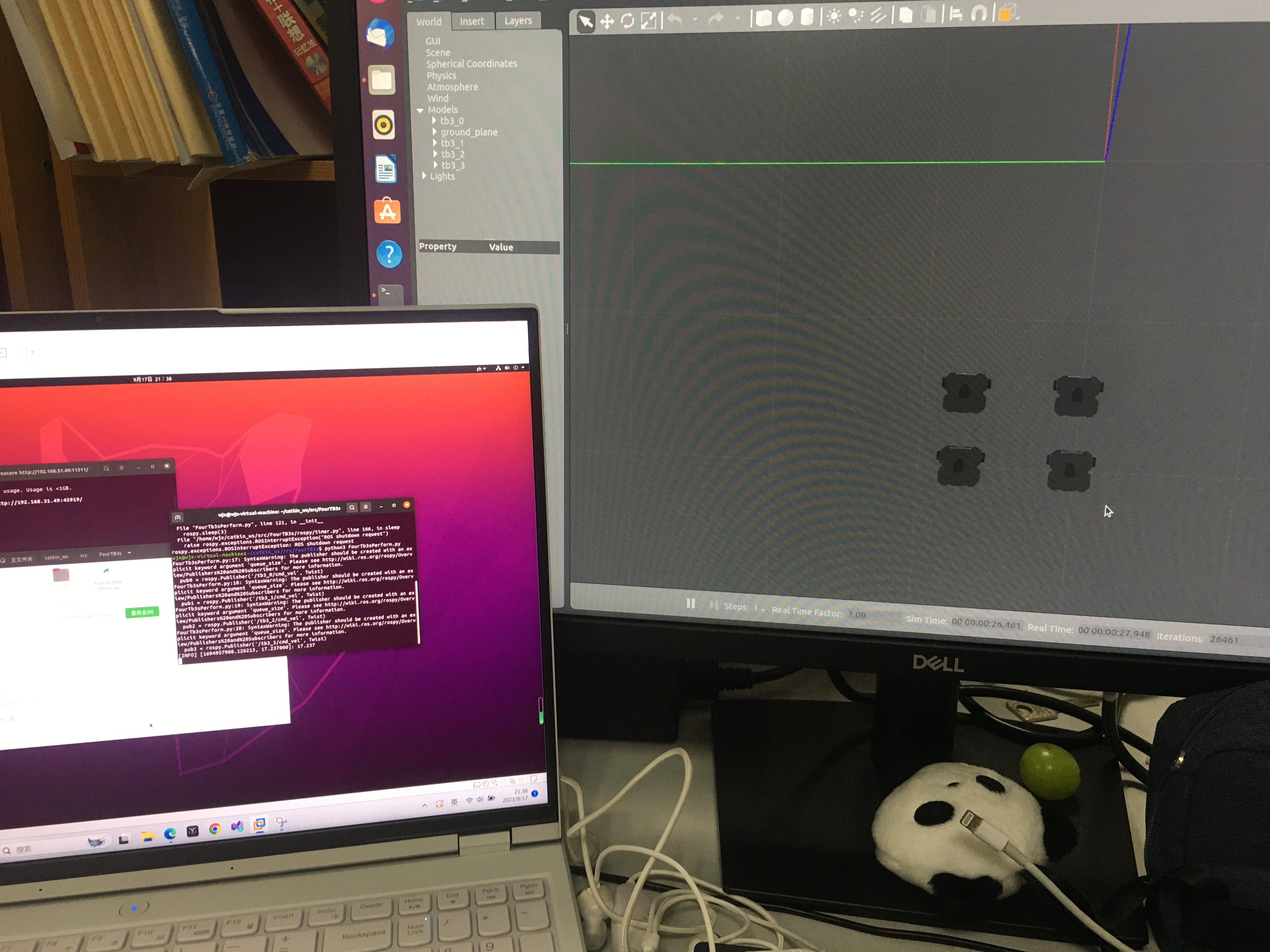
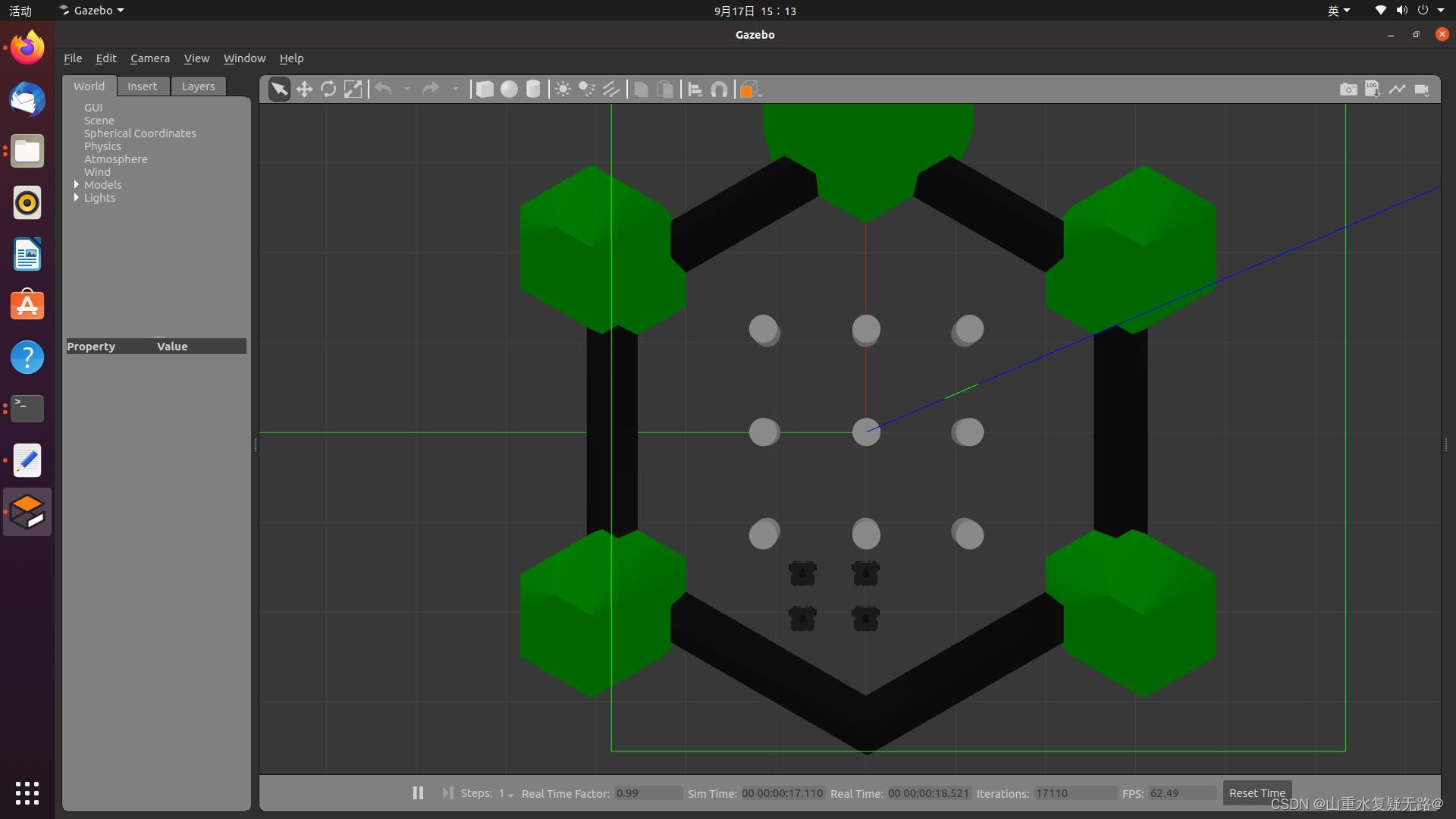
单个机器人的各项仿真实验都基本完成,也实现了远程控制,接下来主要对多机器人编队进行仿真实验,在进行多机器人编队控制前,先要在gazebo仿真中加载多个机器人。在Gazebo仿真环境中成功加载了多个机器人模型,接下来想办法实现在Gazebo中实现多机器人的编队控制。
趁着十一假期,在solidworks中搭建了一个履带式机器人小车,计划将其应用在gazebo中完成多机器人编队的仿真。
实现在gazebo仿真环境中添加多个机器人后,接下来进行编队控制,对具体的实现过程进行记录。