- @qq_44683998
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
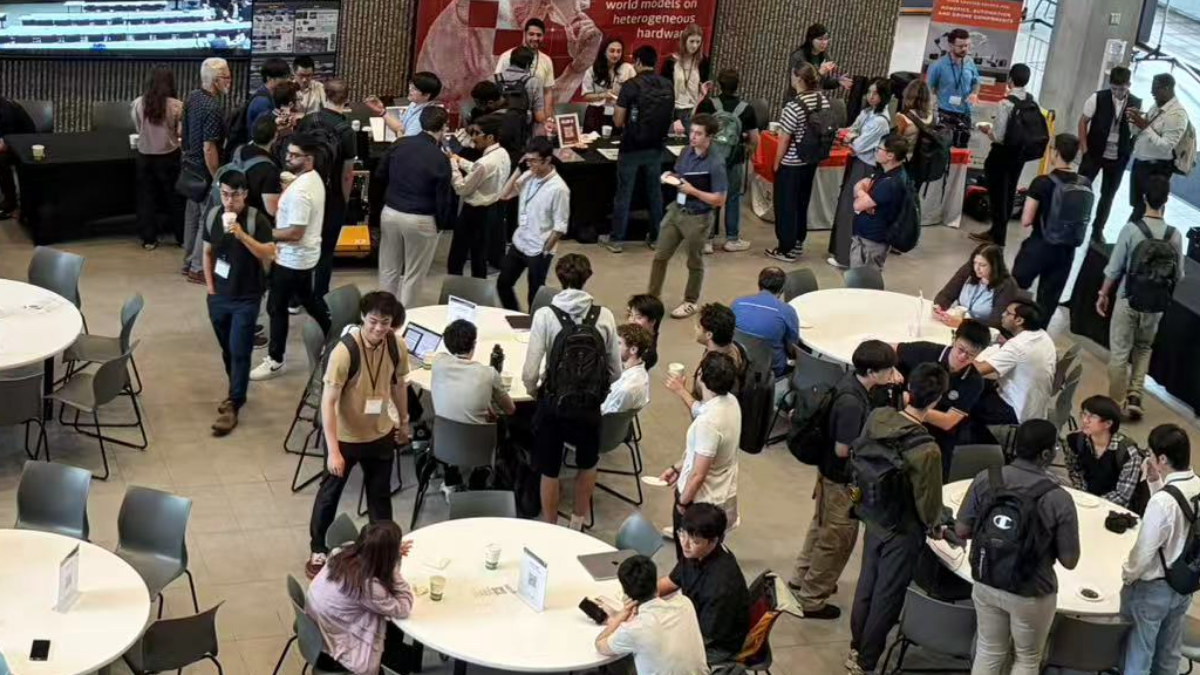
本次大会汇聚国内顶尖高校、科研院所、头部模型企业、机器人研发团队与行业专家,围绕长时序智能体、世界模型、记忆机制、仿真虚实迁移、机器人数据采集等前沿方向展开高规格学术研讨,是国内具身智能领域极具代表性的权威学术盛会。基于Franka原生高精度力控平台,PNP机器人提供开箱即用的整机硬件、实时控制系统、遥操作示教系统、多模态数据采集工具链,完整覆盖:RGB、深度、力觉、关节状态、动作序列、时间戳精准

PNP Robotics深耕机械臂安全控制与VLA真机部署,紧跟UT顶尖研究体系,将前沿CBF安全框架、动态避障算法落地到商用机器人,提供Franka机器人和灵巧手解决方案,推进具身智能规模化落地。UTM多伦多机器人峰会集结北美顶尖实验室与产业方,聚焦机器人灵巧操控、人机安全交互、物理AI工程落地三大核心方向。#多伦多大学 #UTM机器人峰会 #具身智能 #物理AI #机器人控制 #PNPRobo
在顶级学术加持与产业集中亮相的背景下,具身智能赛道的真实竞争格局彻底暴露,内卷加剧、同质化严重成为本届大会最鲜明的行业特征。以宇树可乘坐人形、多款可骑乘四足机器人为代表,不再局限传统巡检、勘探功能,通过载人、代步、特种地形通行等全新场景,跳出同质化内卷,开辟出全新商业化路径,也为中小机器人企业提供了新的突围思路。以宇树可乘坐人形、多款可骑乘四足机器人为代表,不再局限传统巡检、勘探功能,通过载人、代

布局物理AI触觉底层,PNP机器人和加拿大Haply Robotics达成官方合作,负责中国区力反馈业务。

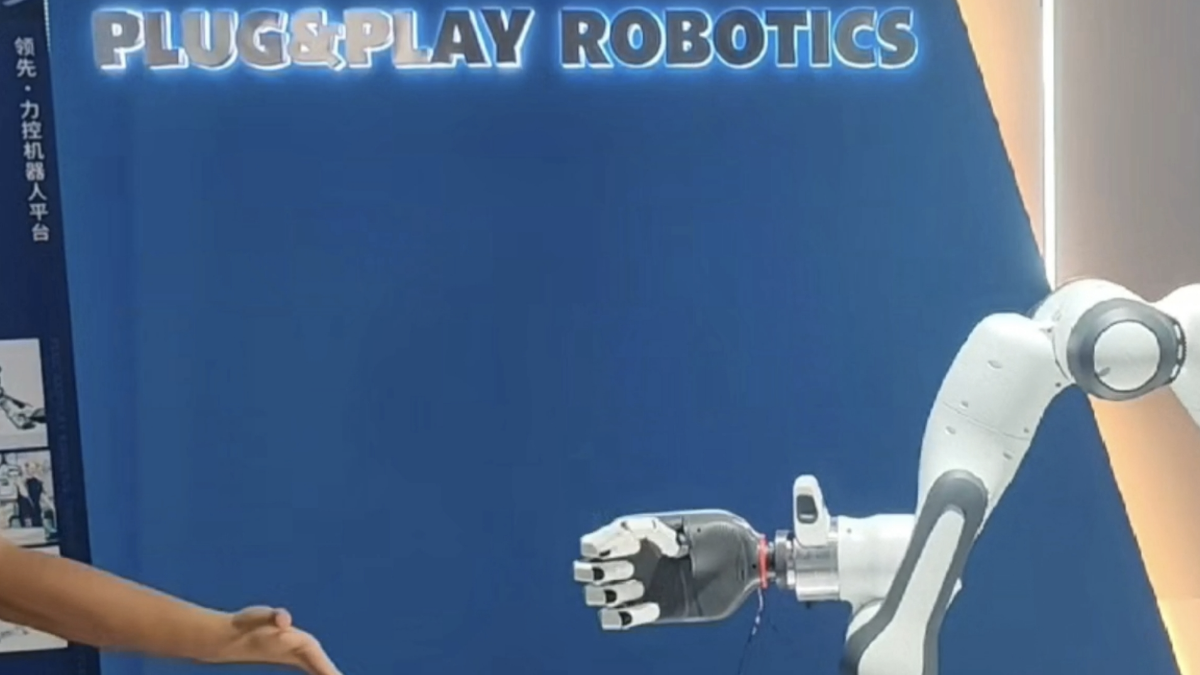
其展出的双臂自主操作系统,依靠视觉语言模型实现无示教、长时序、多步骤自主作业,可完成开箱、分拣、堆叠等复杂任务,也是全场为数不多对标通用具身智能的北美成熟真机方案。ABB、KUKA、UR等头部品牌展出的内容,基本围绕产线搬运、上下料、装配、焊接等标准化自动化任务,优化重点集中在重复精度、运行节拍、产线集成稳定性,以商业化落地为第一目标。中国集中资源突破双臂具身、通用机器人技术。与美国展区形成强烈反
其展出的双臂自主操作系统,依靠视觉语言模型实现无示教、长时序、多步骤自主作业,可完成开箱、分拣、堆叠等复杂任务,也是全场为数不多对标通用具身智能的北美成熟真机方案。ABB、KUKA、UR等头部品牌展出的内容,基本围绕产线搬运、上下料、装配、焊接等标准化自动化任务,优化重点集中在重复精度、运行节拍、产线集成稳定性,以商业化落地为第一目标。中国集中资源突破双臂具身、通用机器人技术。与美国展区形成强烈反
本届大会主题为人工智能推动机器人灵巧手商业化应用,聚焦高精度感知、AI控制、传动材料与场景落地。PNP机器人的VR灵巧手方案,为工业装配、医疗康复、服务机器人等场景提供高效示教与数据采集工具。2026年3月20日,PNP机器人(集智联机器人)创始人包文涛,在上海大零号湾国际会议中心出席第二届机器人灵巧手国际创新大会。演讲主题:以VR灵巧手动作捕捉为核心,分享Plug&Play即插即用赋能具身智能灵

其代表产品 Franka Research 3 以高灵敏力控、七轴结构和开放底层接口成为全球具身智能研究的核心平台,被斯坦福、谷歌DeepMind、清华和北京人形机器人创新中心等广泛采用,成为扩散策略、强化学习和VLA研究的首选具身智能平台。PNP 机器人由哈工大、多伦多大学及 ABB、UR 机器人专家组成,是德国Franka Robotics在中国的官方战略合作伙伴,负责销售、技术支持与生态建设
在机械零件的装配中,能够精准地施加压力,实现零件的完美契合。通过精确的姿态估计和动作捕捉技术,思灵机器人能够生成高质量的数据集,这些数据集不仅涵盖了多视角的RGB-D图像、机器人本体感知状态信息、末端执行器细节以及任务的语言描述,还通过数字孪生环境生成额外的训练数据,确保了数据的一致性和可靠性。例如,在复杂的物体操作任务中,FRANKA机器人可以凭借其精细的力控能力完成 delicate 的操作,

RoboBallet提出了一种创新的多机器人协作规划方法,通过将图神经网络与强化学习结合,实现了高效、可扩展和流畅的协作模式。它不仅在实验中展现了显著优势,还为未来大规模机器人系统提供了新思路。从工业仓储到医疗服务,再到人机共存社会,RoboBallet都有广阔的应用前景。这项研究体现了机器人学、人工智能与图神经网络的深度融合,推动了机器人协作领域向更智能、更自然、更高效的方向发展。