- @qq_43616651
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
非局部均值去噪(Non-Local Means,简称NLM)是一种用于图像处理的去噪算法,特别适用于去除图像中的高斯噪声。它的核心思想是考虑图像中的每个像素,并将其与图像中其他位置的相似区域进行比较。不同于传统的局部去噪方法,NLM算法利用了图像中更广泛区域的信息,从而更好地保持了图像的细节和结构。

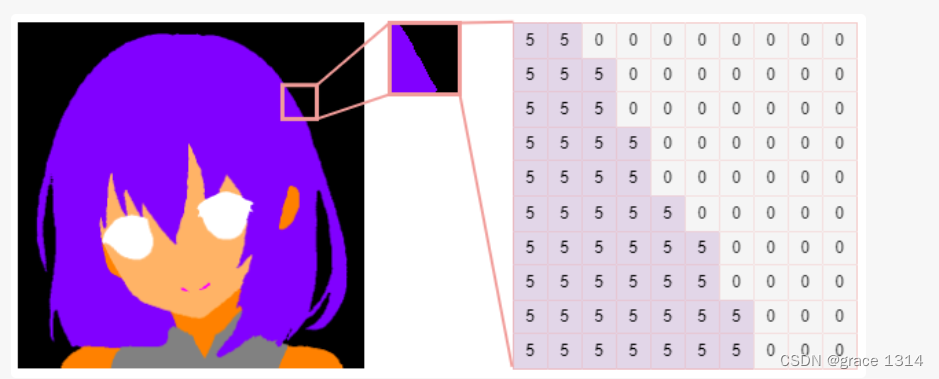
一般是只对图像整体做分类,那么如果是将图像的目标提取出来,这就是语义分割。与分类不同的是,语义分割需要判断每个像素点的类别,进行精确分割,产生目标的掩码,图像的语义分割是像素级别的。
一般是只对图像整体做分类,那么如果是将图像的目标提取出来,这就是语义分割。与分类不同的是,语义分割需要判断每个像素点的类别,进行精确分割,产生目标的掩码,图像的语义分割是像素级别的。
CUDA中用于映射锁页内存(mapped pinned memory)的API,把分配的主机内存映射到CUDA内核的地址空间,使得他们能够直接被访问,称作零复制,因为内存是共享的,复制操作不需要通过总线。事实上,在传输受限型的工作量上,一个集成的GPU可以超过一个更大的独立GPU。虚拟寻址,虚拟地址空间,为物理内存一个一个分配连续编号,以便进行访问,比如0~64kb内存位置是0~65535,指定内
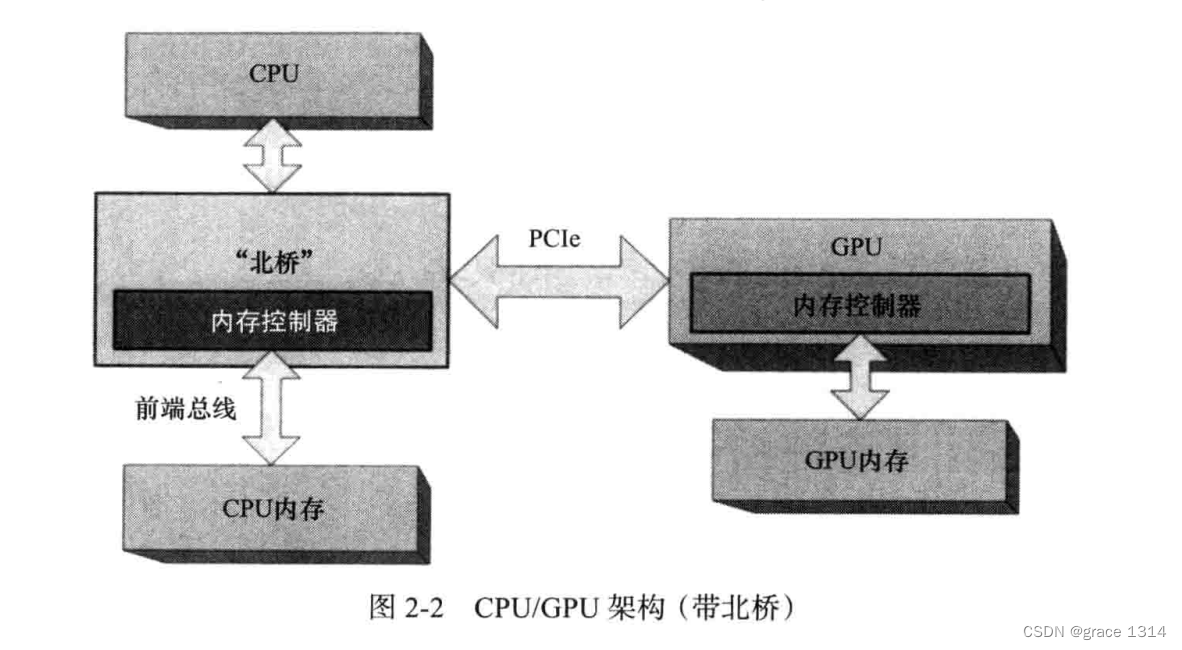
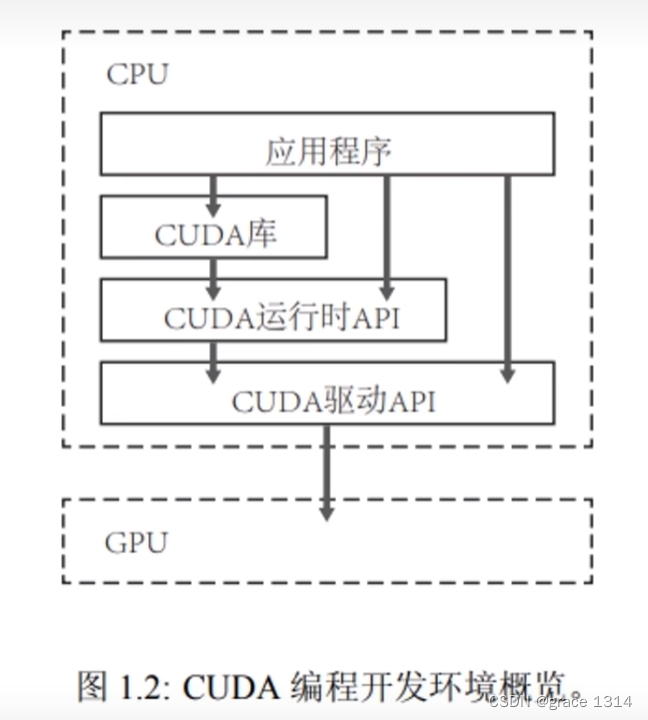
CUDA提供两层API接口,CUDA驱动(driver)API和CUDA运行时(runtime)API。GPU概念,图形处理器,也称显卡,适合进行密集数据运算,包含大量ALU计算核心。CPU概念,中央处理器,适合进行逻辑,ALU计算核心较少。4.显存带宽,运算单元与显存的传输速率,带宽越大,交换速率越大。GPU本省并不能单独计算,CPU+GPU组成异构计算架构;GPU作为CPU的协处理器,一般称为
一般是只对图像整体做分类,那么如果是将图像的目标提取出来,这就是语义分割。与分类不同的是,语义分割需要判断每个像素点的类别,进行精确分割,产生目标的掩码,图像的语义分割是像素级别的。
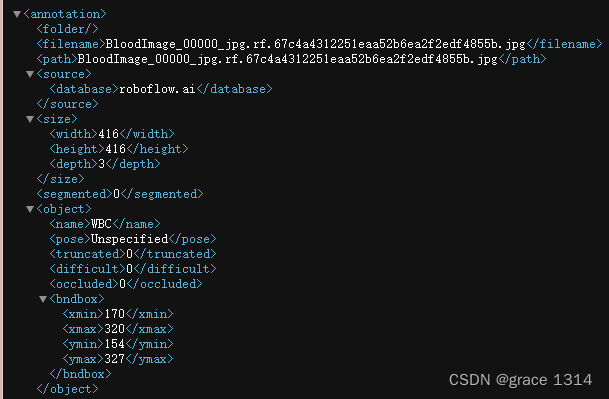
本项目所使用的数据集是BCCD数据集。WBC(白细胞)、RBC(红细胞)、Platelets(血小板)本文所使用的是2021.2.25版本的。包含847张图片,每张图像大小为416x416,图像格式为.jpg所以在后面阶段不需要对图像进行增强操作。当然新版本或者其他版本不同也不影响使用,一些版本图像大小不同,一些对图像并未做预处理,后期可能需要。如果下载的数据集内容不一致,感兴趣的可以在这里下载,
一般是只对图像整体做分类,那么如果是将图像的目标提取出来,这就是语义分割。与分类不同的是,语义分割需要判断每个像素点的类别,进行精确分割,产生目标的掩码,图像的语义分割是像素级别的。
需要对网络进行蒸馏,剪枝,轻量化,是模型大小适宜硬件配置,此外为了更好,更快速的推理,还需要将模型转成不同的模型格式,使其更加适配软件推理。这段代码就是推理的主要流程,其中几个比较重要的点就是blobFromImage函数是将待预测的图片转成网络输入的格式,一般网络的图像输入格式为N,C,H,W。N就是batch数,在推理时一般为1,C即通道数,H,W即为图像的高宽,除此之外这个函数还可缩放图像的