写文章




- @qq_42589613
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
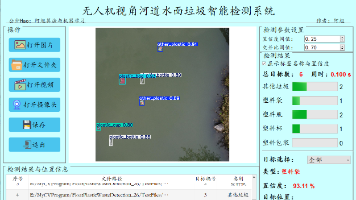
基于YOLO26深度学习的无人机视角河道水面垃圾检测系统【python源码+Pyqt5界面+数据集+训练代码】
基于YOLO26深度学习的无人机视角河道水面垃圾检测系统【python源码+Pyqt5界面+数据集+训练代码】
搞定小目标检测!SAHI+YOLO实战指南,推理 + 微调一步到位【附源码】
搞定小目标检测!SAHI+YOLO实战指南,推理 + 微调一步到位【附源码】

【超全总结】深度学习分割模型的损失函数类别及应用场景
【超全总结】深度学习分割模型的损失函数类别及应用场景

YOLO与SAM实战:目标检测与图像分割的高效融合方案
YOLO与SAM实战:目标检测与图像分割的高效融合方案

基于YOLO11深度学习的运动品牌LOGO检测与识别系统【python源码+Pyqt5界面+数据集+训练代码】
基于YOLO11深度学习的运动品牌LOGO检测与识别系统【python源码+Pyqt5界面+数据集+训练代码】

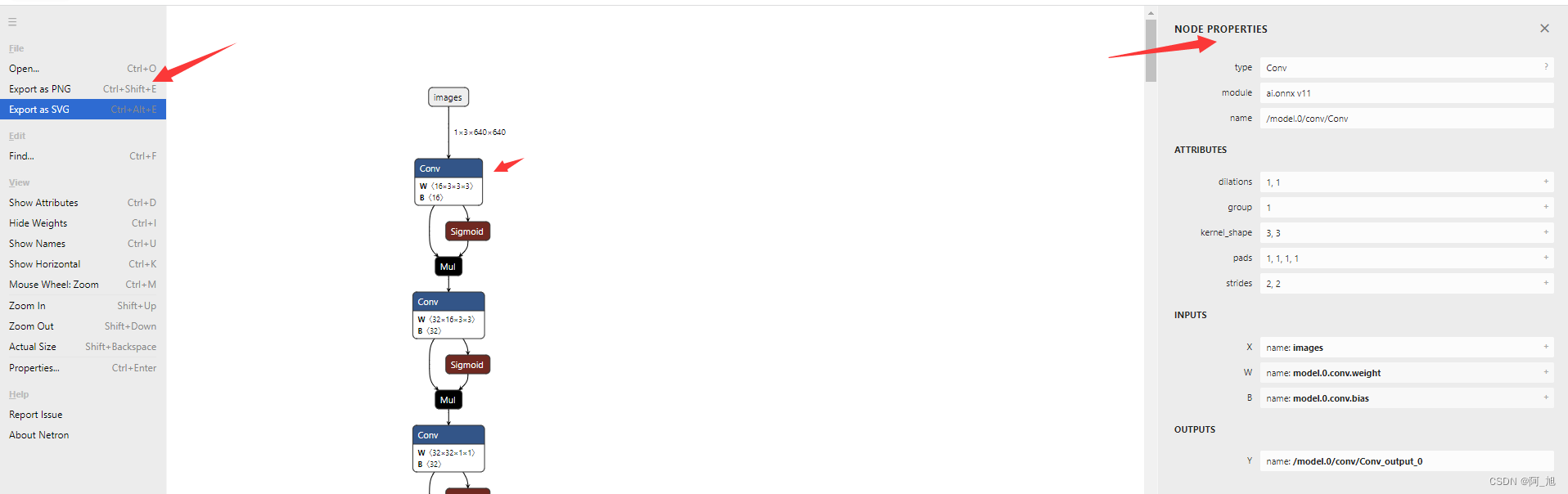
【手把手教学】如何可视化YOLOv8深度学习的网络结构并保存
【手把手教学】如何可视化YOLOv8深度学习的网络结构并保存
基于YOLOv8深度学习的智能道路裂缝检测与分析系统【python源码+Pyqt5界面+数据集+训练代码】深度学习实战、目标检测、目标分割
基于YOLOv8深度学习的智能道路裂缝检测与分析系统【python源码+Pyqt5界面+数据集+训练代码】深度学习实战、目标检测、目标分割
基于深度学习的人脸面部表情识别系统【含Python源码+PyqtUI界面+原理详解】
基于深度学习的人脸面部表情识别系统【含Python源码+PyqtUI界面+原理详解】

基于YOLO11/v10/v8/v5深度学习的老鼠智能检测系统设计与实现【python源码+Pyqt5界面+数据集+训练代码】
基于YOLO11/v10/v8/v5深度学习的老鼠智能检测系统设计与实现【python源码+Pyqt5界面+数据集+训练代码】

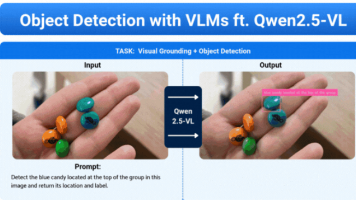
Qwen2.5-VL 实战:用 VLM 实现 “看图对话”,从目标检测到空间推理!【附源码】
Qwen2.5-VL 实战:用 VLM 实现 “看图对话”,从目标检测到空间推理!【附源码】