
写文章




- @qq_41701758
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
基于控制障碍函数(CBF)与虚拟偏心点法的欠驱动无人艇编队与动态避障控制(附 Python 完整源码)
控制障碍函数(CBF)结合二次规划(QP),为多智能体系统的安全控制提供了一个极其优雅的框架。将“想做什么(编队目标)”放入优化函数,将“绝对不能做什么(撞击、断联)”放入约束条件,这种思维方式在无人机集群、无人车以及水面无人艇等领域都有着广阔的应用前景。希望本文的代码与推导能为您的研究提供参考。
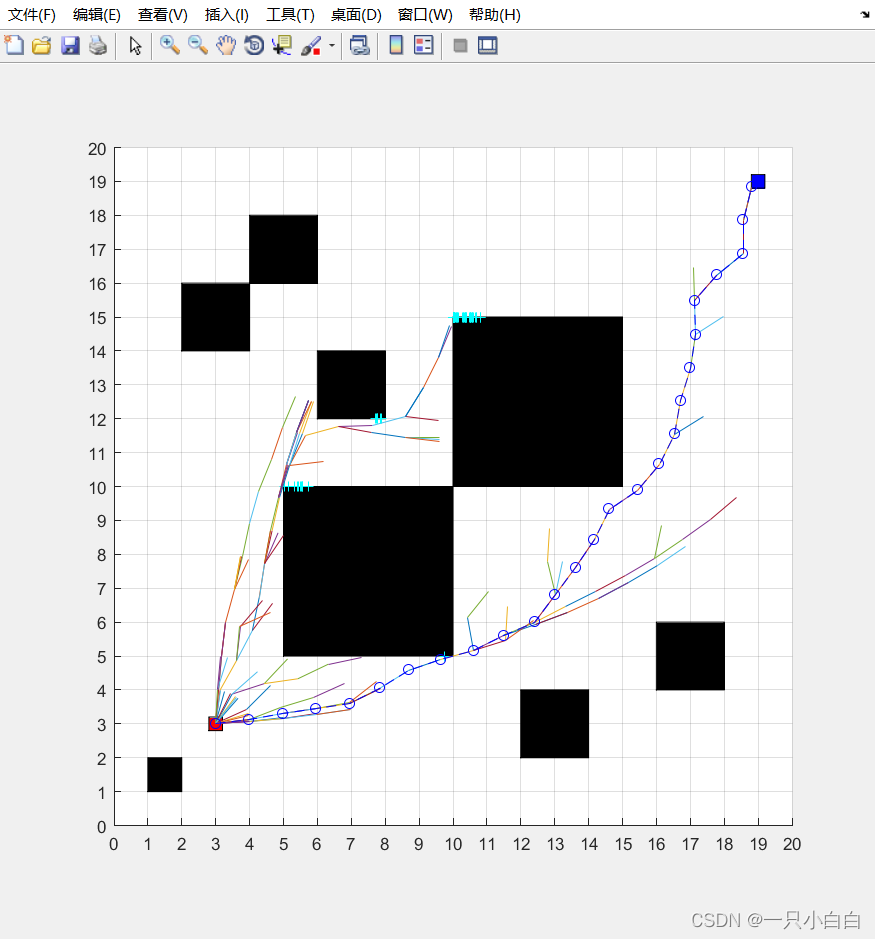
【MATLAB】一种改进RRT寻路算法
【MATLAB】一种改进RRT寻路算法
到底了