- @qq_40598340
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
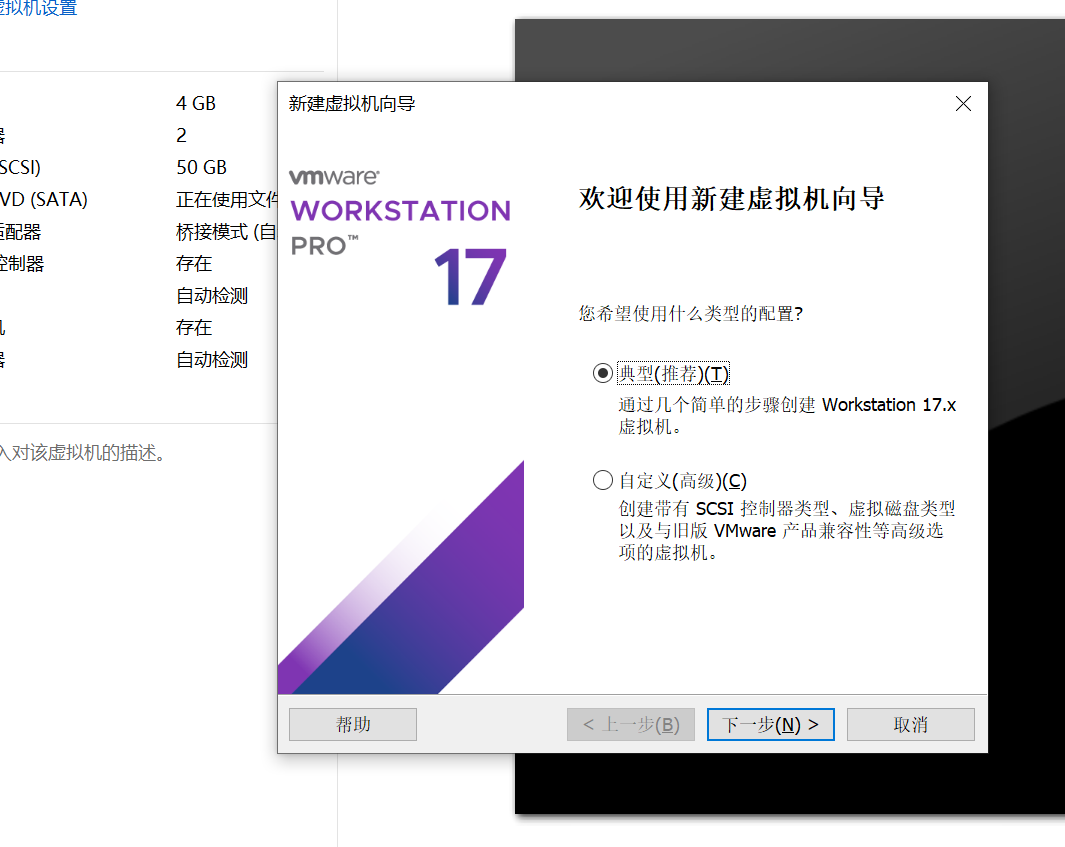
选择需要安装的系统ISO文件,我的系统版本为 ubuntu-22.04.3-live-server-amd64.iso,然后点击关闭完成.内存不要太小,处理器数量我选择的2,内核处理数量为1,因为为是自己的电脑,如果是服务器,则需要根据自己的服务器硬件配置来定。虚拟机名称自己定义,点击浏览,选择虚拟机的安装位置(自定义即可,尽量安装到磁盘大一点的位置)重启后输入用户名和密码.然后ping一下外网,
之前整理过一次工业机器人的相关标准,包含测试认证的,技术指导的,行业要求的。并添加了在线链接,主要是道客巴巴(复制的时候,不能复制链接,分享下在线文档),方便需要时及时阅读。这里也分享需要的人,如果有歧义之处,可以共同讨论下。
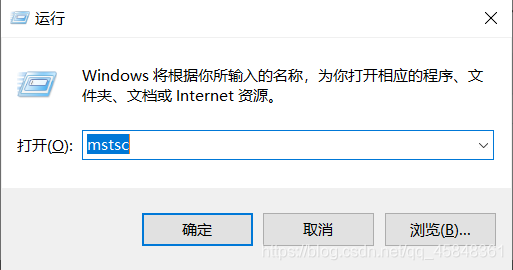
问题现象:1为启用对服务器的远程访问2远程计算机关闭3.在网络上一次计算机不可用。
编码器按工作原理可以分为光电式、电容式、感应式、电触式等,光电式又可以分为绝对式编码器和增量式编码器两大类。这里只讨论光电式编码器及磁编码器。编码器包括码盘和码尺。前者用于测角度,后者用于测长度。因为实际接触的基本上是码盘是的,故这里只讨论码盘。

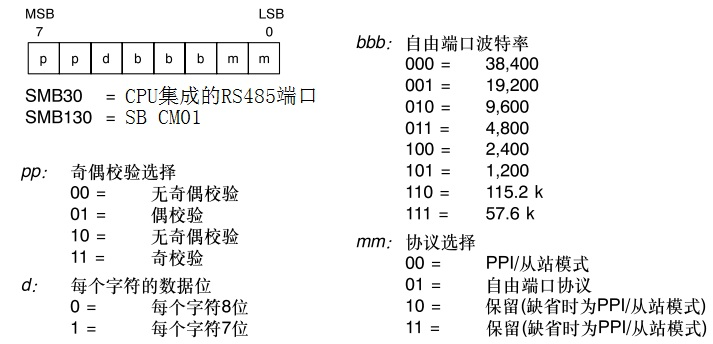
S7-200smart CPU本体集成一个RS485通信板,端口号为0.或者增加一个扩展信号板(RS285/RS233),串口号为1.SMB30(端口 0 ) 和 SMB130(端口 1 )用于定义通信端口的工作模式。S7-200 SMART CPU 处于 RUN 模式时,才能进行 PPI 通信或自由口通信模式的选择;CPU 处于STOP 模式时,自由口通信模式被禁用,自动进入 PPI 通信模式。