写文章




- @qq_37746927
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
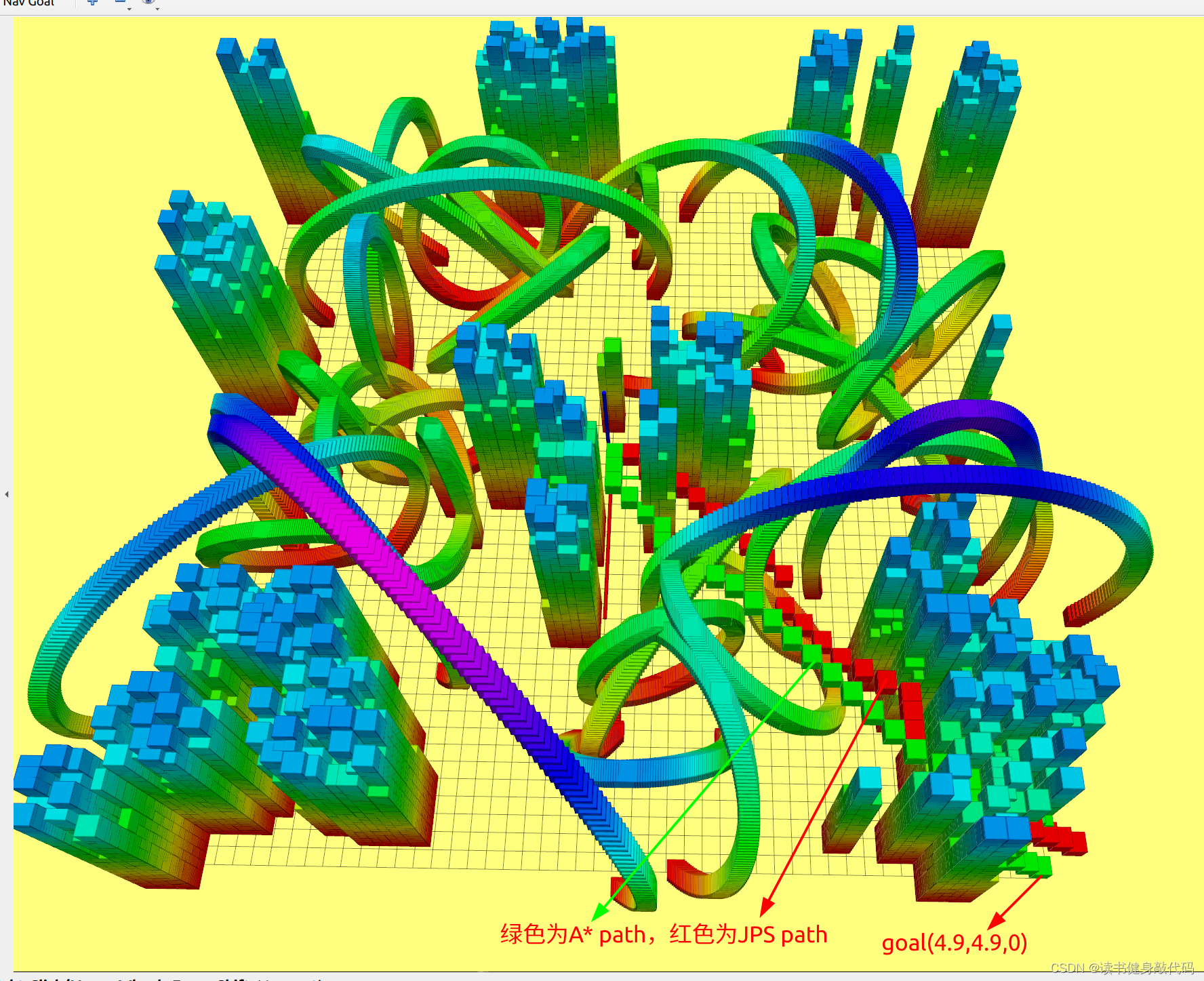
【深蓝学院】移动机器人运动规划--第2章 基于搜索的路径规划--作业
【深蓝学院】移动机器人运动规划--第2章 基于搜索的路径规划--作业
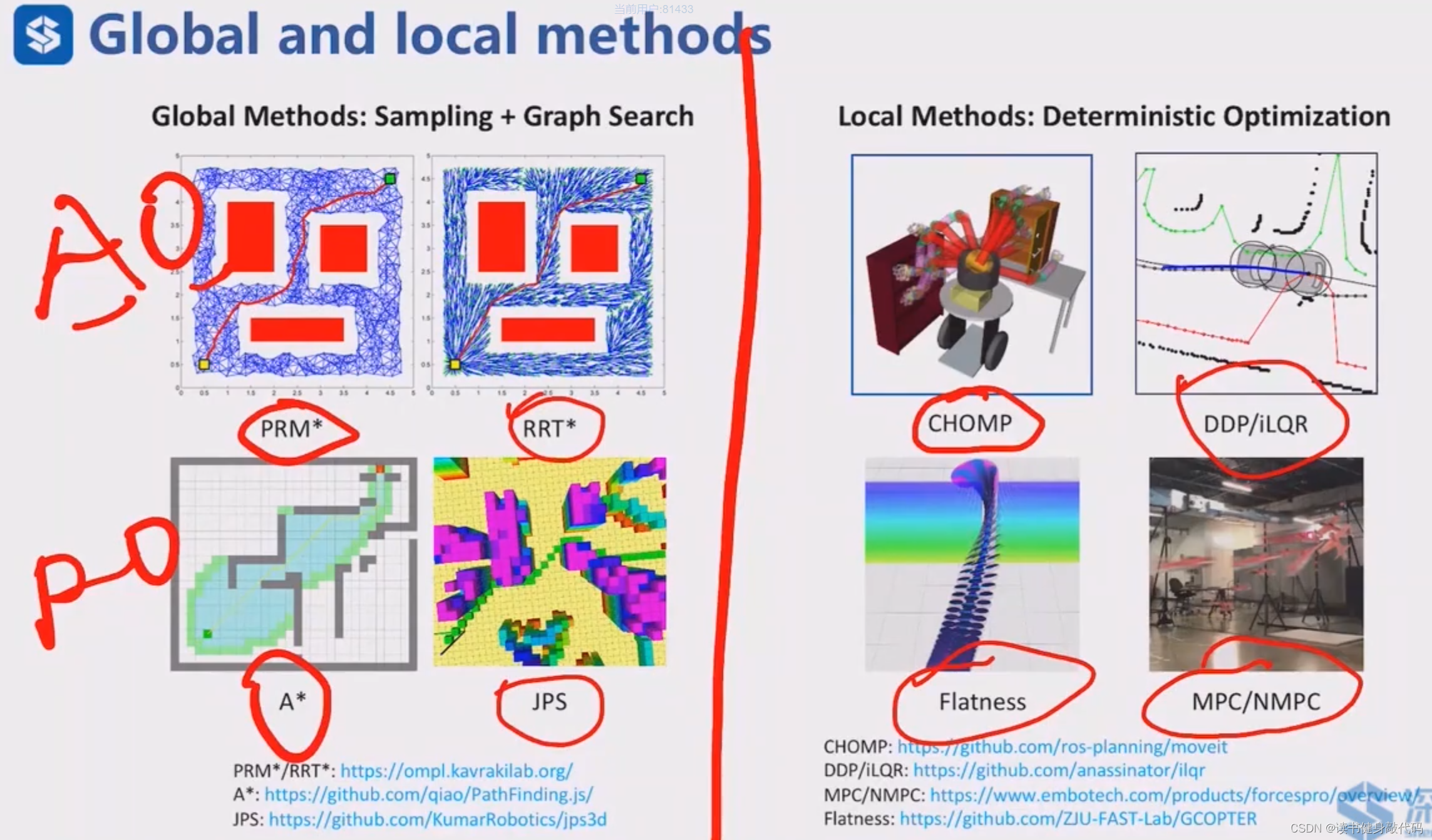
【深蓝学院】移动机器人运动规划--第4章 动力学约束下的运动规划--笔记
【深蓝学院】移动机器人运动规划--第4章 动力学约束下的运动规划--笔记
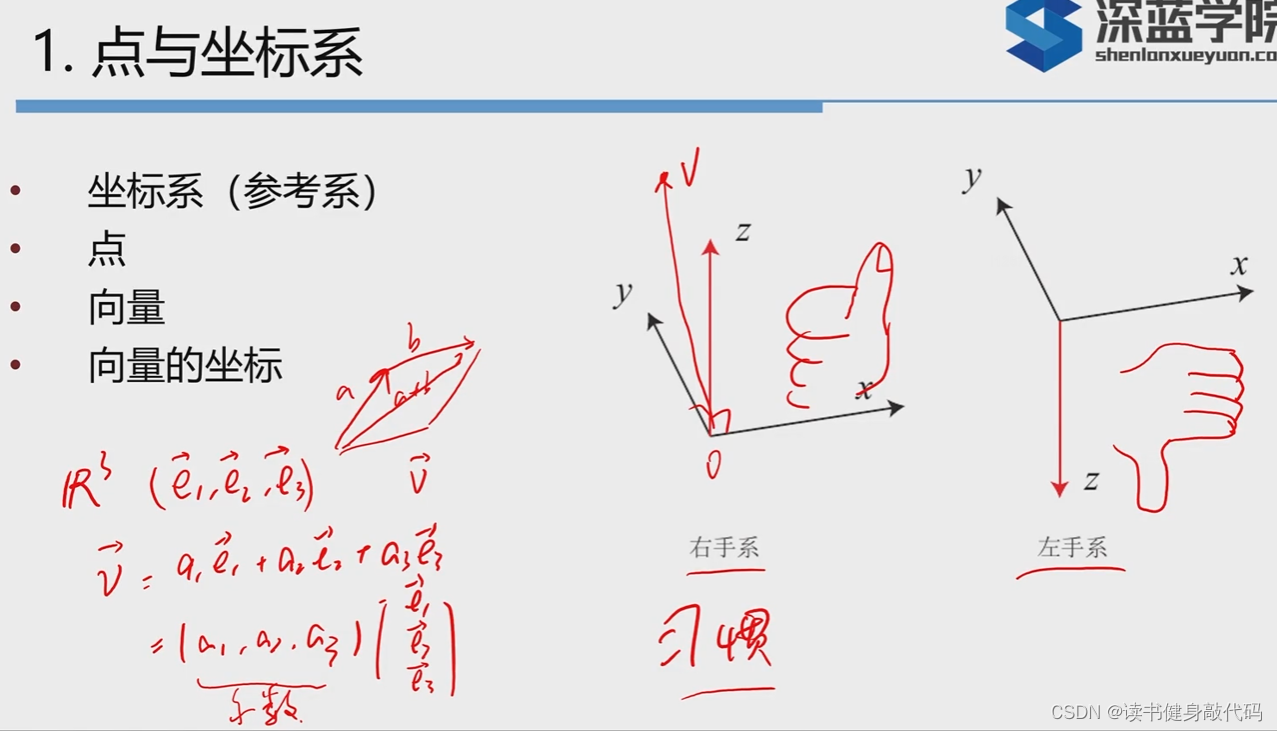
视觉SLAM课程-第2讲笔记--三维空间刚体运动
SLAM第3章
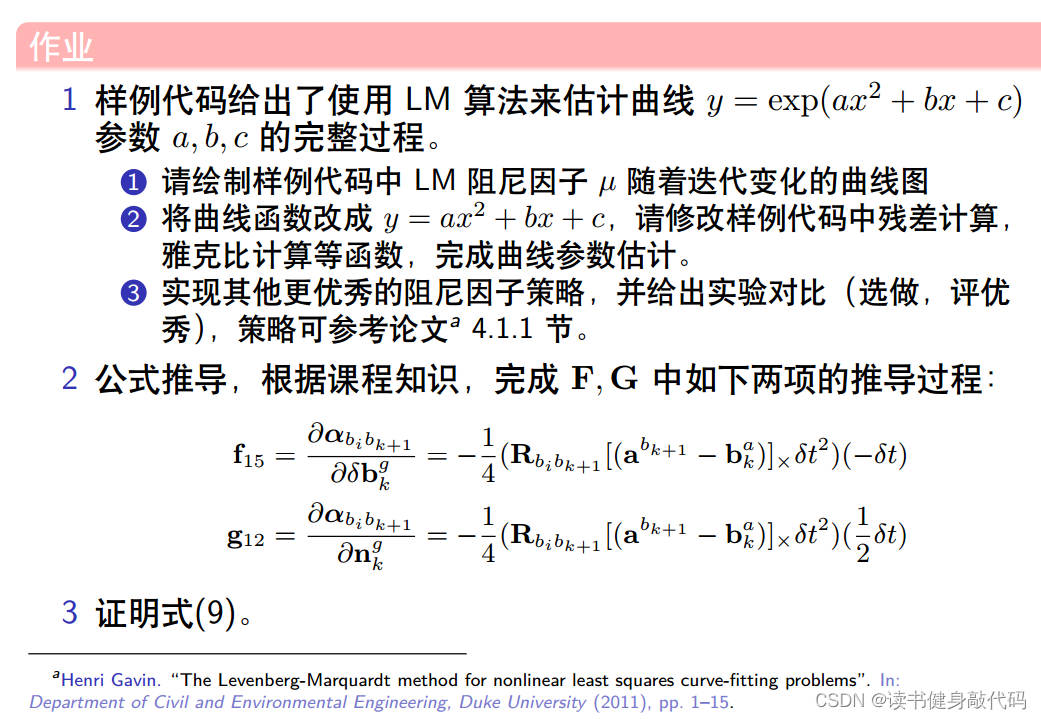
手写VIO第3章--基于优化的 IMU 与视觉信息融合--作业(LM算法探究,雅可比F、G详细推导)
【深蓝学院】手写VIO第3章--基于优化的 IMU 与视觉信息融合--作业(LM算法探究,雅可比F、G详细推导)
视觉SLAM课程-第1讲笔记
SLAM理论与实践第一次课
视觉SLAM课程-第1讲作业,SLAM开发环境搭建,CMake自建库,并FindPACKAGE(踩了坑)
SLAM环境搭建,ch1作业完成

C++容器和find()算法
C++容器与find算法
视觉SLAM课程-第4讲作业(T5矩阵微分,T6手写高斯牛顿,T7批量MLE)
视觉SLAM第四讲作业
【深蓝学院】移动机器人运动规划--第5章 最优轨迹生成--笔记
【深蓝学院】移动机器人运动规划--第5章 最优轨迹生成--笔记
【深蓝学院】移动机器人运动规划--第3章 基于采样的路径规划--笔记
【深蓝学院】移动机器人运动规划--第3章 基于采样的路径规划--笔记