- @qq_34645958
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
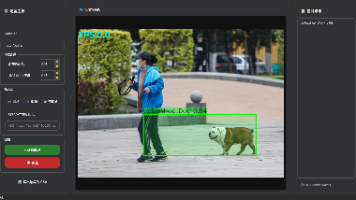
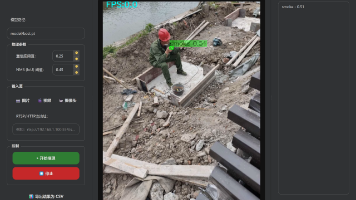
此类行为不仅容易导致犬只走失、受伤或发生交通事故,更可能因犬只失控而引发邻里纠纷,甚至造成人身伤害,尤其对儿童、老人及怕犬人士构成潜在威胁。尽管多地已出台相关管理条例,明确要求携犬出户时必须使用牵引绳,但由于缺乏高效、常态化的监管手段,违规行为仍难以被实时发现与取证。因此,探索利用计算机视觉技术,特别是基于深度学习的实时目标检测算法,对公共区域中“遛狗未牵绳”行为进行自动识别与预警,成为提升城市宠
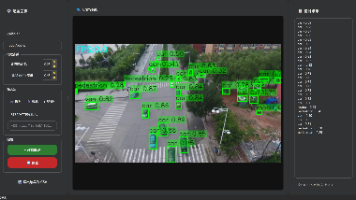
然而,无人机从空中俯视获取的影像与传统地面或固定监控视角存在本质差异:目标物体(如车辆、行人、建筑)通常呈现尺度极小、分布随机、视角独特且背景复杂多变的特点,同时无人机高速飞行和悬停引起的运动模糊、图像畸变及光照剧烈变化,进一步加剧了检测难度。因此,研究面向无人机视角特性优化的YOLO检测算法,旨在提升模型对微小目标、密集目标和动态背景的鲁棒性,对于实现无人机的自主环境感知与智能决策具有关键的理论
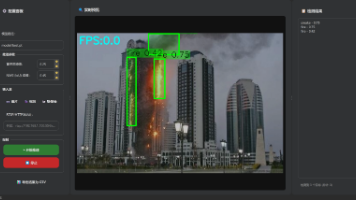
火灾常以烟雾为早期征兆,其蔓延迅速、破坏力强,对生命财产构成严重威胁。随着计算机视觉技术的发展,基于YOLO等深度学习模型的目标检测技术,能够实时自动识别监控视频中的烟雾与火焰,实现毫秒级预警。这不仅能提升安防系统的智能化水平,为应急响应争取宝贵时间,更可广泛应用于森林防火、智慧城市、工业安全等场景,有效防范灾难扩大,是构建主动式安全防护体系的重要技术支撑。A:免费提供Python转换脚本,支持Y
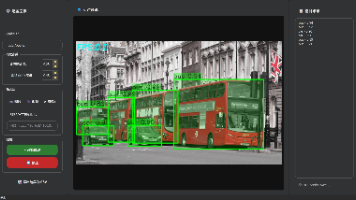
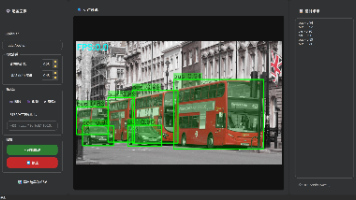
车辆类型的精确自动检测是智能交通系统、自动驾驶及智慧城市管理的核心任务之一。随着城市化进程加速与机动车保有量激增,高效、准确地识别道路场景中的轿车、卡车、公交车、摩托车等不同类型车辆,对于实现交通流量监控、违章行为取证、路径规划及自动驾驶环境感知具有至关重要的应用价值。在此背景下,本研究旨在针对复杂交通场景,探索基于YOLO框架的车辆类型检测模型优化方法,致力于提升模型在多变环境下的分类精度与泛化
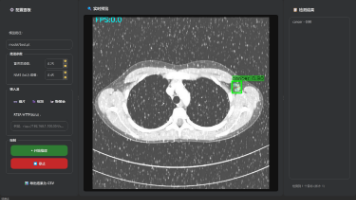
在全球人口健康保障体系中,肺部疾病(如肺癌、肺炎、肺结核等)因其高发病率、高致死率及强传染性,已成为威胁人类生命健康的重大公共卫生问题,早期精准诊断是提升治疗效果、降低死亡率的关键。随着深度学习技术在医学影像领域的深度渗透,基于人工智能的肺部 CT 影像分析方法应运而生,为实现病变的自动化、精准化检测与分割提供了新方向,有效缓解医师诊疗压力、提升诊断效率,契合当前精准医疗发展需求,成为医学影像智能
该技术通过分析摄像头或传感器捕获的图像或视频流,实时识别与定位道路环境中的车辆和行人,为辅助驾驶、碰撞预警、智能监控和自主导航等应用提供关键感知支撑。然而,实际道路场景的复杂性——如光照变化、目标尺度差异、遮挡、密集交通流以及恶劣天气条件——对检测算法的准确性、鲁棒性和实时性提出了严峻挑战。近年来,随着深度学习的突破,尤其是基于卷积神经网络(CNN)的目标检测模型(如Faster R-CNN、YO

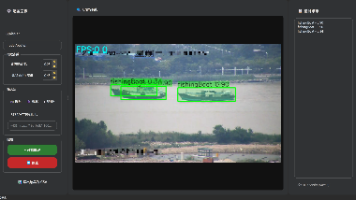
在此背景下,YOLO 系列作为主流的单阶段实时目标检测算法,凭借端到端训练、高帧率处理及持续迭代的性能优势,为船舶检测提供了高效解决方案 —— 从 YOLOv3 引入特征金字塔网络提升多尺度检测能力,到 YOLOv7、v8 通过结构优化实现精度与速度的突破,其衍生模型已在船舶检测场景中展现出卓越潜力,不仅 mAP@0.5 可达 96.3%、支持 30fps 实时处理,还能通过轻量化设计(模型体积低
传统的人工巡查与定点传感器监测方式,存在覆盖范围有限、响应滞后、人力成本高且在恶劣天气下实施困难等固有缺陷,难以满足对大面积、实时性道路积水态势感知的迫切需求。近年来,随着计算机视觉、物联网与边缘计算等技术的成熟,基于视觉感知的道路积水检测方法展现出巨大潜力。然而,实际应用仍面临诸多挑战:复杂光照条件(如反光、夜晚)、动态场景干扰(车辆驶过激起的水花、波浪)、积水形态多变以及不同材质路面反射特性差

随着智慧城市与安全生产建设的深化,公共场所的违规抽烟行为管控已成为保障公共安全与健康的关键环节。传统人工监控方式存在效率低、覆盖窄的瓶颈。尽管基于深度学习的目标检测技术,特别是以YOLO系列为代表的实时检测算法,为此提供了可行的技术路径,但针对“抽烟”这一特定行为,仍面临香烟目标细小、姿态多变、遮挡严重及复杂场景干扰等核心挑战。因此,开发一个能够精准、实时识别抽烟行为的智能化检测系统,具有重要的现
无人机视角下的目标检测是计算机视觉领域的重要研究方向,随着无人机技术的快速发展和广泛应用,其相关研究也日益受到关注。与传统固定摄像头或地面拍摄视角不同,无人机能够提供独特的俯视或倾斜视角,具备高度灵活、视野广阔的优势,已广泛应用于城市规划、农业监测、灾害救援、交通管理、安防巡逻等多个领域。近年来,随着深度学习的突破,尤其是卷积神经网络和Transformer等模型的发展,无人机目标检测在精度和效率