- @qq_34059233
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在图像处理中我们有时候对图像或者区域进行纠偏,在刚性变换场景中,图像发生的变化是平移和旋转,本文就来介绍根据2个及2个以上目标点的平移来计算如何对图像和区域纠偏,这种方式的好处是你可以不需要知道角度的偏移
在 C# 中,MEF(Managed Extensibility Framework) 是 .NET 官方的插件化框架,用于构建可扩展的应用程序,典型就是插件编程,本文就来介绍如何通过Mef实现插件编程。

依赖注入的作用是改变A、B两个对象之间的依赖关系,将B对象本来是在A中创建改成外部创建后再通过注入的方式传进来,从而实现对象之间的解耦,减少对象之间的直接依赖关系,使代码更加灵活和可维护。
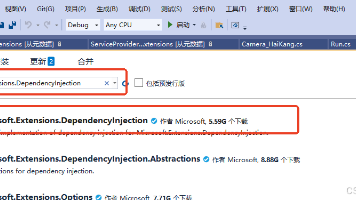
控制反转是将对象的创建、依赖管理和生命周期控制从应用程序代码中转移出来,交由外部容器来管理,这种外部容器也称为IOC容器,在C#中比较常见的IOC容器是Microsoft.Extensions.DependencyInjection
我们开发的上位机软件经常会遇到卡顿的情况,卡顿的原因很多种,有一种就是电脑的内存被占满了,所以监控内存的利用率能够有效的判断上位机软件卡顿是否由电脑内存导致。

我们开发的上位机软件经常会遇到卡顿的情况,卡顿的原因很多种,有一种就是电脑的CPU利用率达到了100%,所以监控CPU的利用率能够有效的判断上位机软件卡顿是否由CPU负荷过重导致,CPU负荷一般发生在死循环、线程无延时、线程太多等场景。
在C#编程种经常听过异步编程,本文就来以一个实际案例来讲解异步编程中async、await的用法。我们要实现也给需求,点击界面按钮后,五秒后界面的Lable控件的值被赋值为“123”,下面分别介绍4种方法。

上位机软件开发中启动和停止按钮几乎是每个上位机软件必须具备的功能,使用传统winform开发时如果仅仅给Button按钮添加文本作为启动和停止按钮,这样会让上位机软件界面开起来很丑,本文就来讲解一种美化启动、停止按钮界面的方法,该方法可以扩展到所有需要美化的按钮,为提高上位机软件的逼格提供了有效的途径!
我们在Visual Studio 编译和打包你的项目时,如何处理文件以及将其放置在哪里,比如现在winform软件界面使用到了一些图标,我们发布项目时,是将这些图标嵌入到exe中还是如何?在vs中“生成操作”的类型决定了编译和打包你的项目的方式,本文就来讲解几种方式。
传统固定阈值分割只适用于光照均匀的图像,对于光照不均匀导致的图像亮度不一致的场景无法使用,但使用动态阈值分割能够有效解决亮度不一致的问题。