
写文章




- @qq_20184333
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
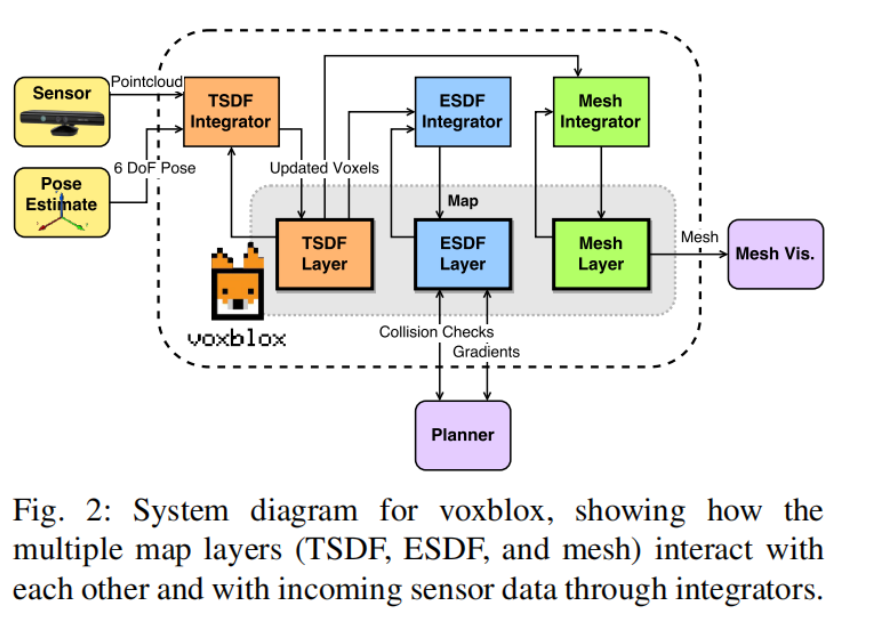
voxblox论文翻译以及部分代码解析
当我们专注于使用更大的体素大小来加速计算的时候,一个重要的需要考虑的就是如何使得新的扫描数据被整合到现有的体素网格中(voxel grid),对于大的体素(大约几十厘米)来自同一次扫描产生的数千个射线也许会映射到同一个voxel,我们利用这一点通过设计一个对每一个end voxel只执行一次光线投射的策略来显著提高速度。【投影映射】:把在可视区域内的体素投影到深度图里面,同时计算它的距离:在深度图
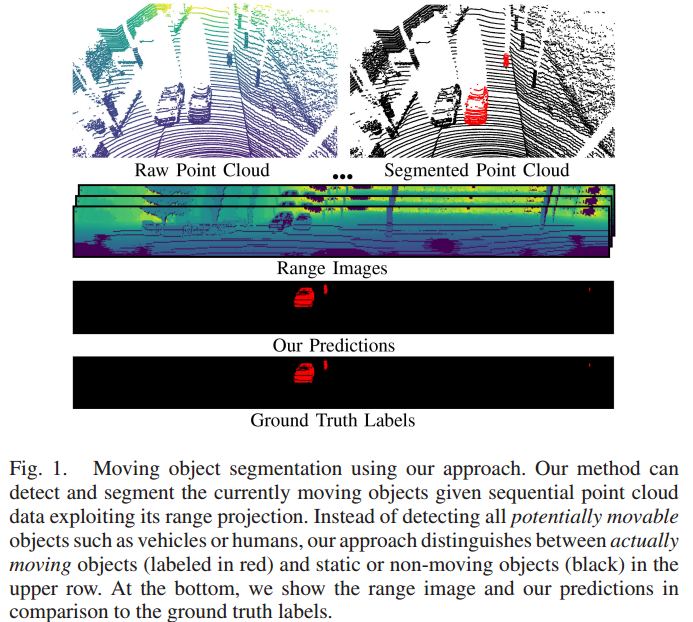
Moving Object Segmentation in 3D LiDAR Data: A Learning-Based Approach Exploiting Sequential Data 翻译
在场景中检测和分割移动物体的能力对于构建一致的地图、做出未来状态预测、避免碰撞和规划至关重要。在这封信中,我们解决了3D激光雷达扫描中运动物体分割的问题。我们提出了一种新颖的方法,将当前仅激光雷达移动物体分割的最新技术向前推进,为自主机器人和其他车辆提供相关信息。我们的方法不是从语义上对点云进行分割,即预测车辆、行人、道路等语义类,而是。
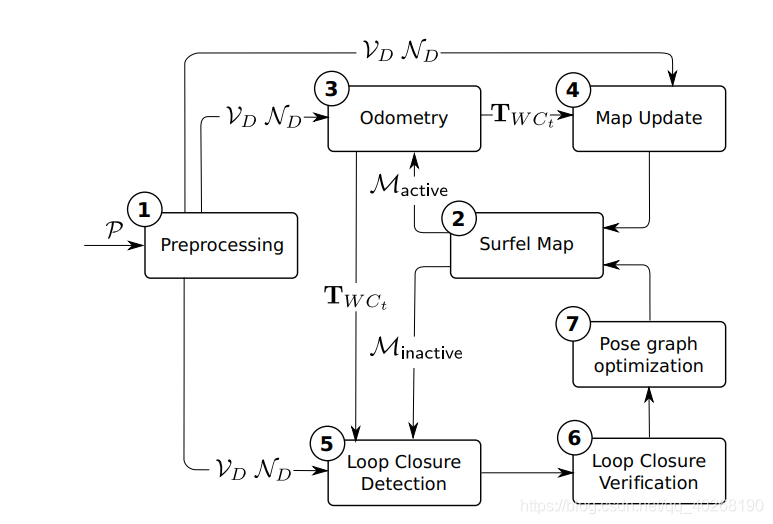
SuMa++代码阅读记录
有关SUMA++的代码阅读,包括搜罗的网上的一些解析以及自己的见解
ICP算法概述以及使用SVD进行算法推导
CP算法概述以及使用SVD进行算法推导
LOAM、LEGO-LOAM与LIO-SAM的知识总结
LOAM、LEGO-LOAM与LIO-SAM的知识总结
到底了