
写文章




- @qq_17405041
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
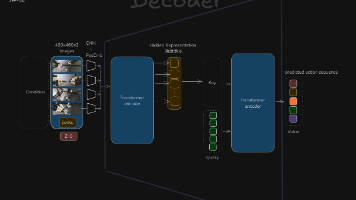
机器人如何模仿人类学习精细的操作任务--Aloha ACT算法科普
硬核解析:机器人如何模仿人类进行精细操作任务
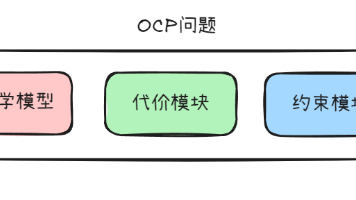
自动驾驶核心技术:轨迹优化与Acados求解器实战指南
T-MPC (Topology-Driven Model Predictive Control) = 拓扑驱动的模型预测控制核心思想并行优化多条轨迹(每条对应不同的避障策略)使用引导约束(Guidance Constraints)确保轨迹多样性选择代价最小的轨迹执行传统MPC:优化1条轨迹 → 执行T-MPC:优化N条轨迹(左绕、右绕、中间穿过...)↓选择最优轨迹 → 执行(以单车模型为例)模块
到底了