- @qq18080951
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
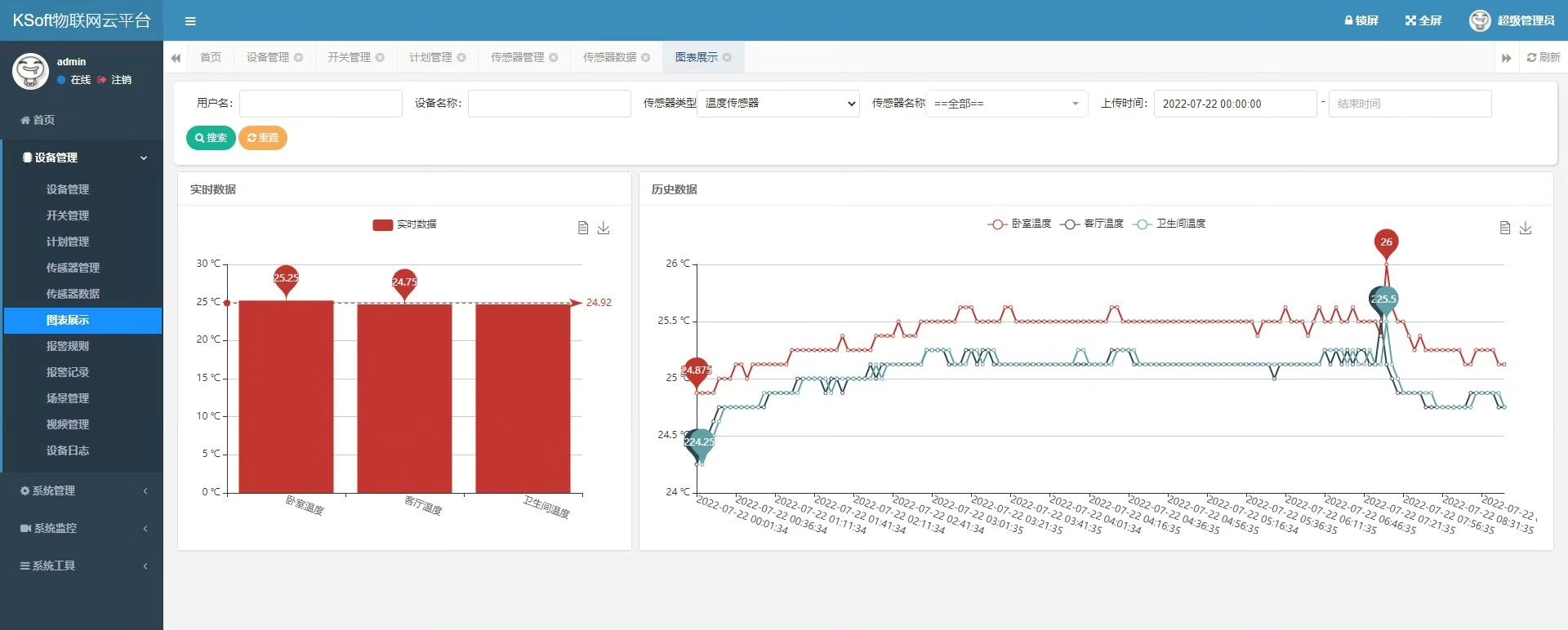
物联网业务本身并不复杂:设备上线 → 上报数据 → 触发规则 → 执行动作。分页、缓存、权限、多数据源、Excel、MQTT、XSS、防重、日志……每开一个新项目都要复制一遍,BUG 也随之复制。KSoft 把上述能力沉淀到,并全部开源无加密。本文不再重复“功能列表”,而是一行一行把代码读给你听类签名为什么这么写?字段为什么加transient?哪一行隐藏了性能陷阱?哪一行做了物联网场景的特殊补偿
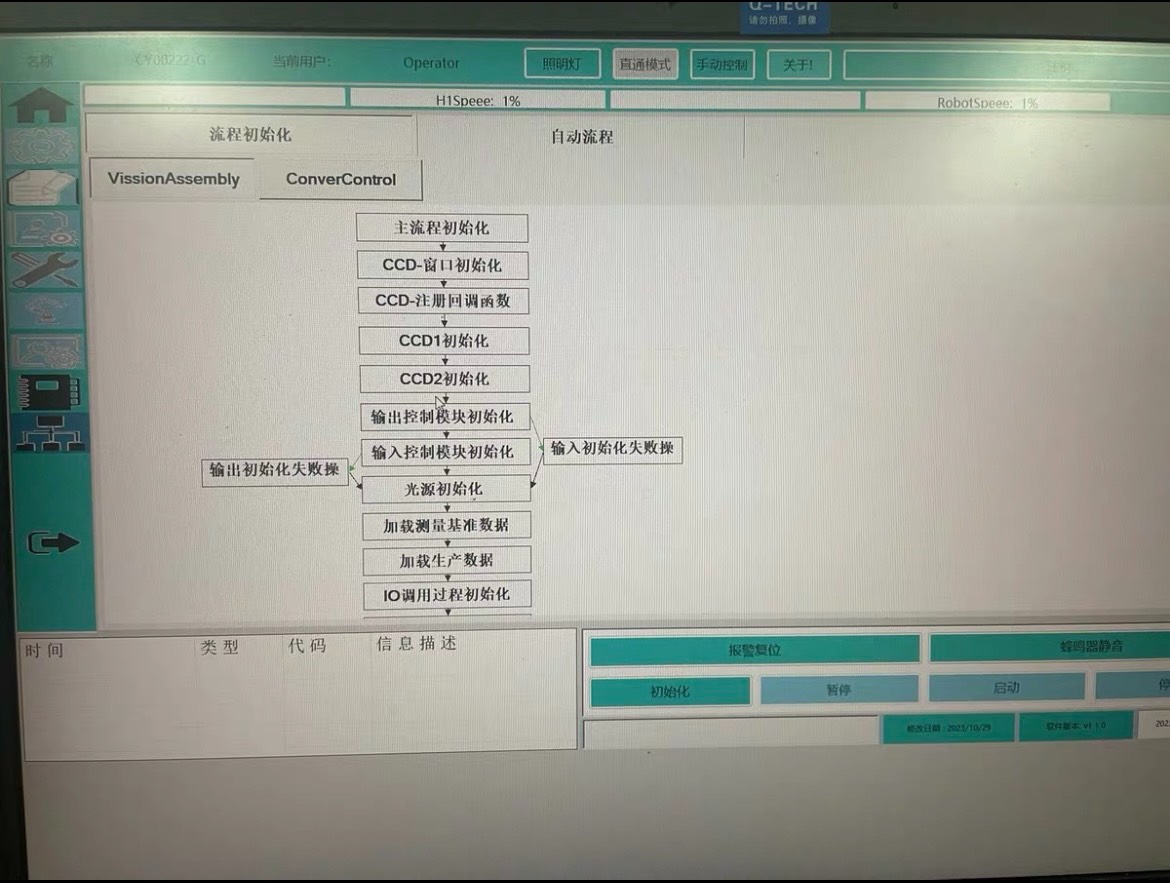
这个框架的GitHub仓库里已经扔了二十几个常用功能的实现案例,从简单的串口通信到EtherCAT总线控制都有现成模板。特别适合需要快速验证方案的场景——昨天刚有个做半导体检测的哥们儿用这个框架,三小时就搭出了晶圆定位系统。最近在捣鼓C#和Halcon的联合作业方案时,整了个挺有意思的视觉框架。这个架构最大的特点是模块之间像乐高积木似的随便拼装——视觉检测和运动控制完全解耦,你甚至能在泡面的时候顺
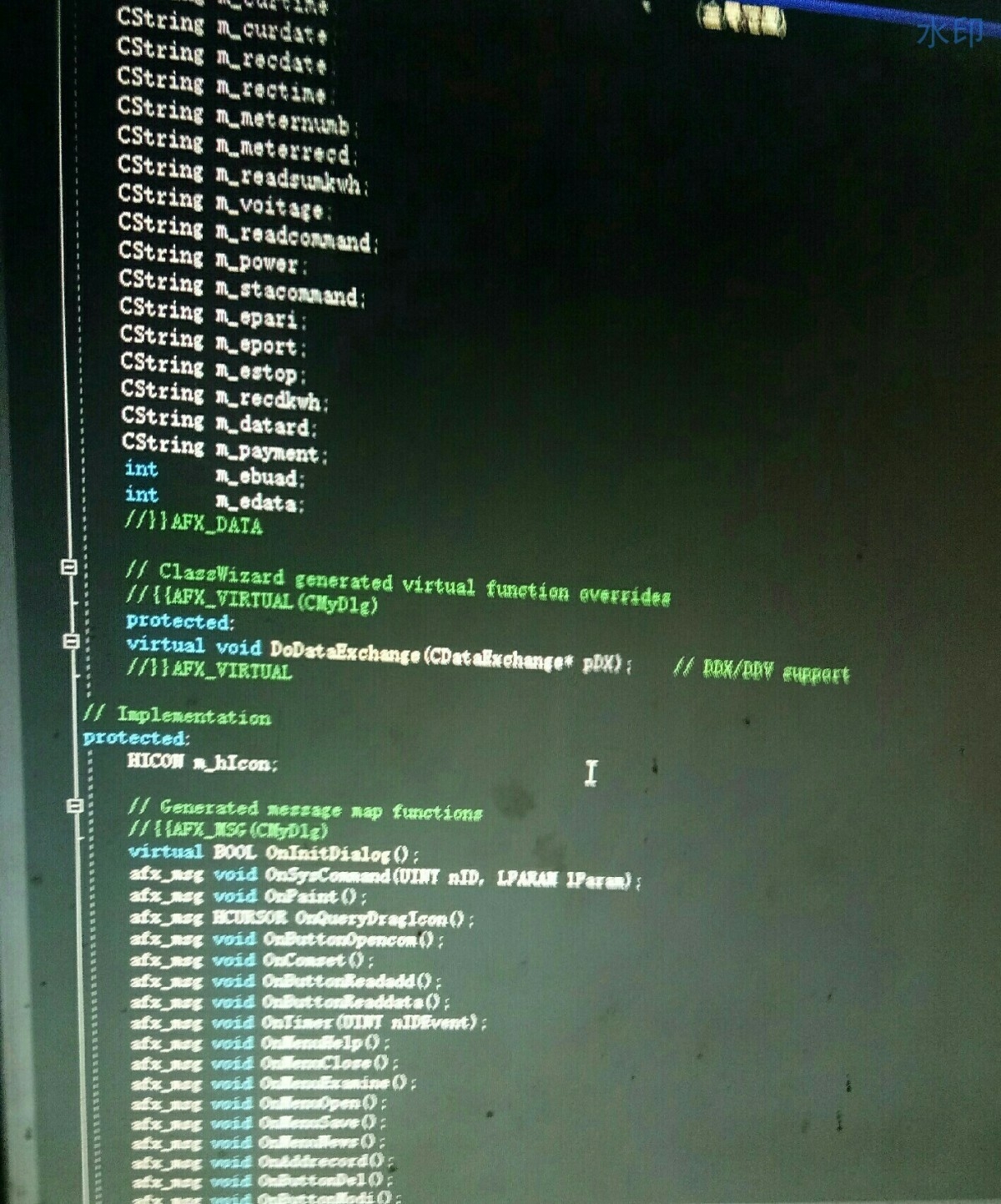
整个过程就是这样了,从485通信到读取数据,再到存储到数据库,虽然步骤不少,但每个环节都还算清晰。当然,实际项目中可能会遇到更多问题,比如通信不稳定、数据格式复杂等等,这就需要根据具体情况来调整了。最近在搞一个C++开发的智能电表读数程序,主要是通过485接口和计算机通信,读取电量并存到数据库里。说实话,这玩意儿一开始还挺让人头疼的,毕竟涉及到硬件通信和数据处理,搞不好就各种bug满天飞。不过,经
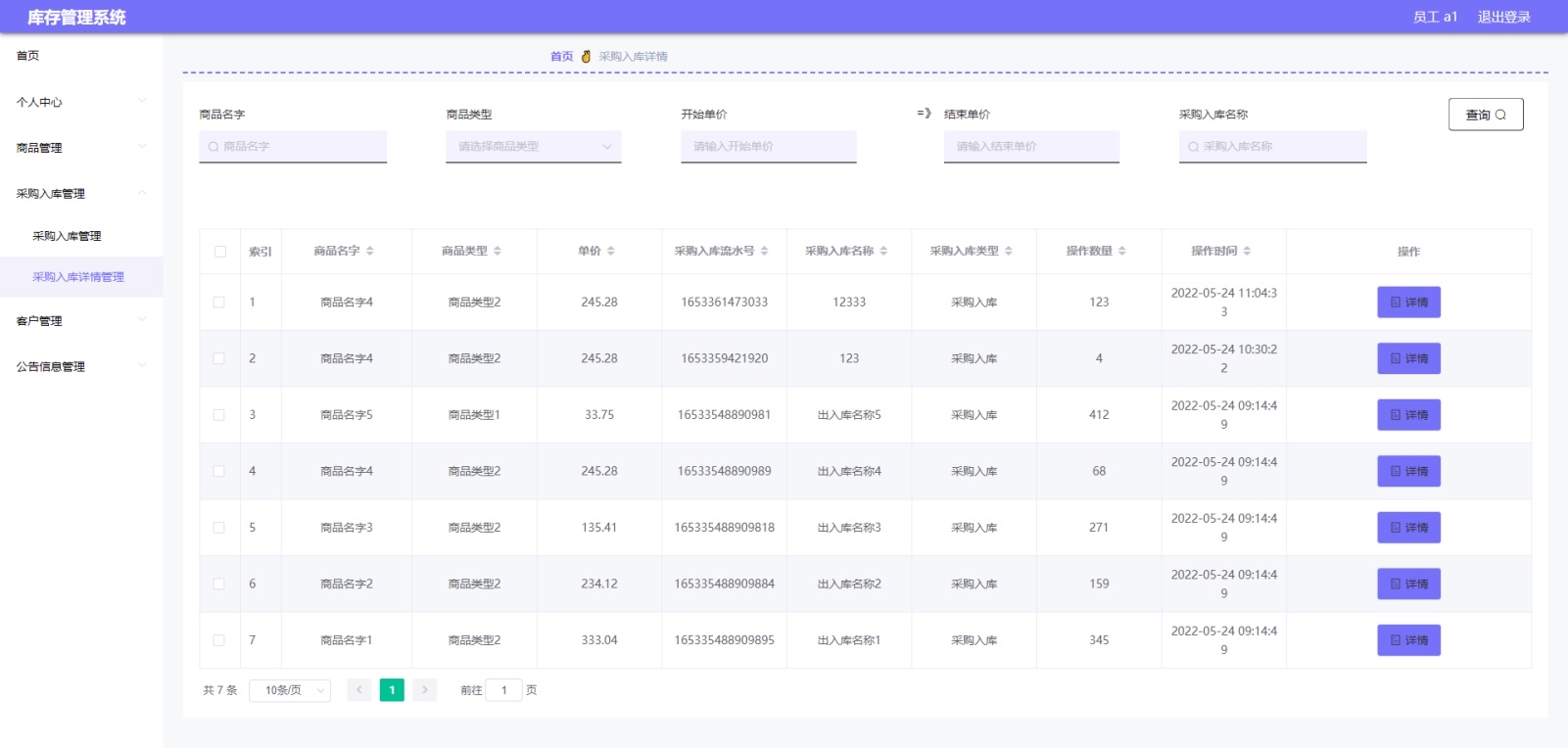
基于springboot+vue库存管理系统springboot+vue+mybatis+mysqlspringboot在当今数字化浪潮下,构建高效的库存管理系统对于企业运营至关重要。本文将带大家走进基于 Spring Boot + Vue 技术栈,搭配 MyBatis 和 MySQL 的库存管理系统开发之旅。
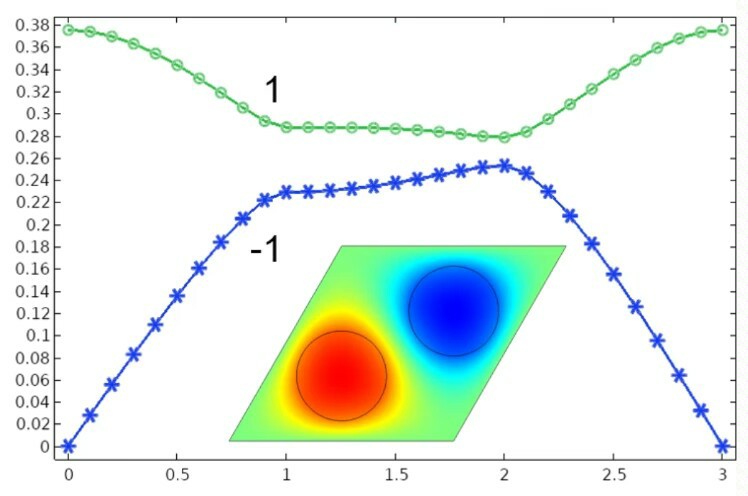
实测数据表明,蜂窝晶格在Dirac点打开带隙时,陈数会从0跳变到±1,这时候系统就进入拓扑非平庸态了。今天就带大家手把手用Comsol搞一波能带拓扑陈数的计算,顺便拆解几个关键代码段——保证不搞那些八股文式的分析,咱们直接上干货。重点来了:扫描路径必须覆盖整个布里渊区,通常用三角形路径采样,千万别傻乎乎地用矩形区域扫描,那样算出来的陈数绝对翻车。这个脚本生成的坐标直接导入Comsol的几何接口,分
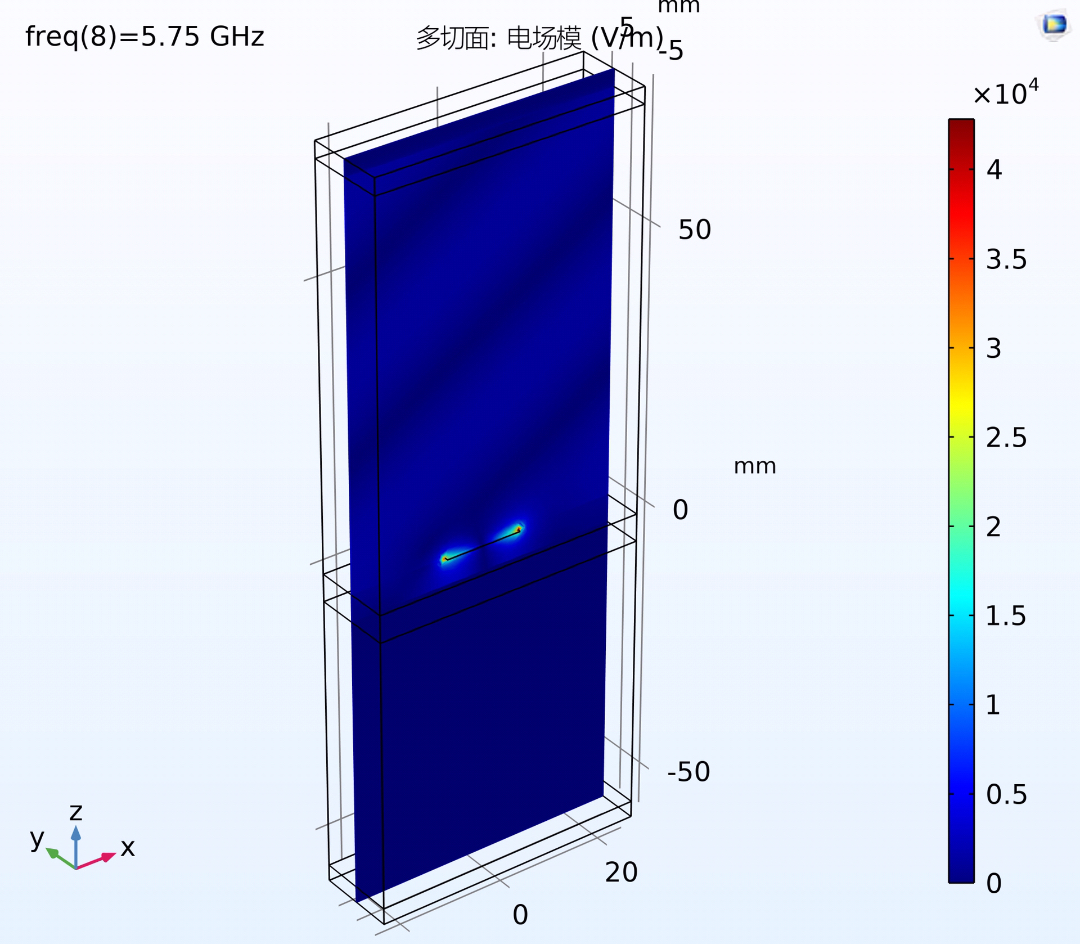
画个金属光栅周期阵列,这里有个偷懒诀窍——用矩形堆叠代替真实纳米结构,参数化设置周期d=500nm,槽宽w=300nm,厚度t=50nm。材料库直接调用Gold光学常数,注意要勾选"色散材料"选项,毕竟金属在可见光波段可是有强色散特性的。观察结果时发现个有趣现象:TE波在600nm附近出现异常反射抑制,而TM波在同样位置反射增强。注意衍射级次是否出现消失模,当入射角过大时高阶衍射会突然消失,这时候
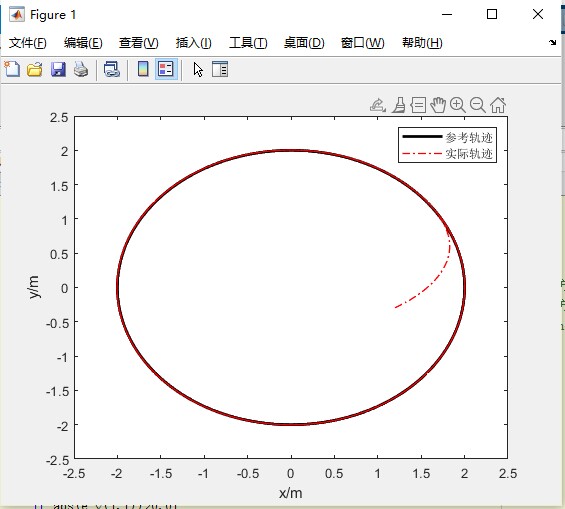
本MATLAB代码针对轮式移动机器人,构建了基于运动学与动力学模型的双闭环控制体系,并融入抗扰控制技术与非线性扩张状态观测器(ESO),实现了对圆形参考轨迹的精准跟踪。代码通过多模块协同工作,完成从参考轨迹生成、位姿误差计算、控制量输出到运动状态更新的全流程,同时具备对扰动的观测与抑制能力,最终通过多维度数据可视化呈现跟踪效果,为轮式移动机器人轨迹跟踪算法的验证与优化提供了完整的仿真平台。
MATLAB实现高斯光束到平顶光束的转变基于GS算法或者直接计算SLM相位分布。
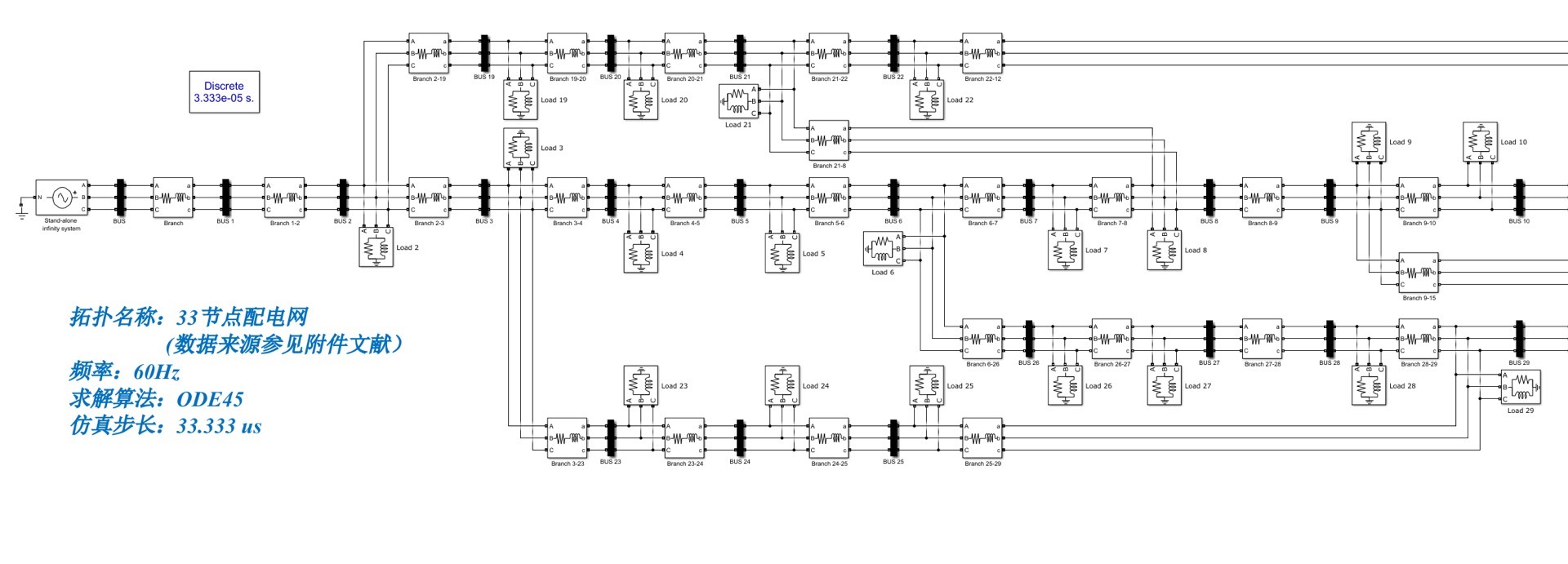
最后说个坑:进行参数扫频时,如果遇到"代数环"报错,把Simulink求解器从ode23tb换成ode15s,步长强制设为1e-5秒,亲测有效。附带有详细节点数据以及文献出处来源,MATLAB,simulink各个版本均可运行,可以进行潮流计算以及四种常见故障波形仿真,可以更换线路模型,分布参数模型用于故障仿真(50km线路阻抗数据已经计算完毕,帮助节约大量时间更换模型),集中参数模型用于潮流计算
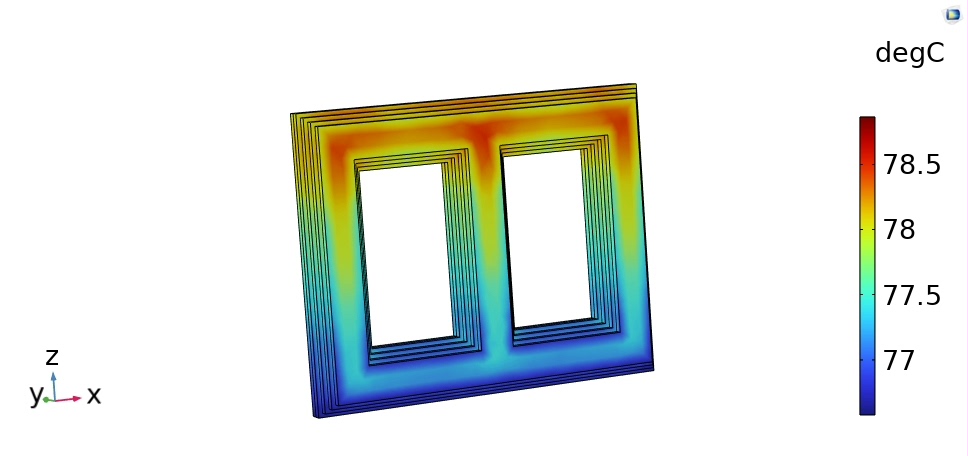
前两天刚折腾完一个油浸式变压器的全耦合模型,电磁场、损耗、温度场、流体搅和在一起,那酸爽谁做谁知道。咱今天就掰开揉碎了聊聊这里头的门道。最后说个实战技巧:在材料属性里加温度依赖函数时,别直接用T变量,改成T-T_ref的形式能避免迭代发散。关键参数别瞎填,特别是绕组材料的非线性B-H曲线(别用默认的线性近似,真会翻车)。算完磁场别急着收工,损耗分布得用后处理里的焦耳热生成器抓出来,这个热源分布可是