




- @osvHKXEHM
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
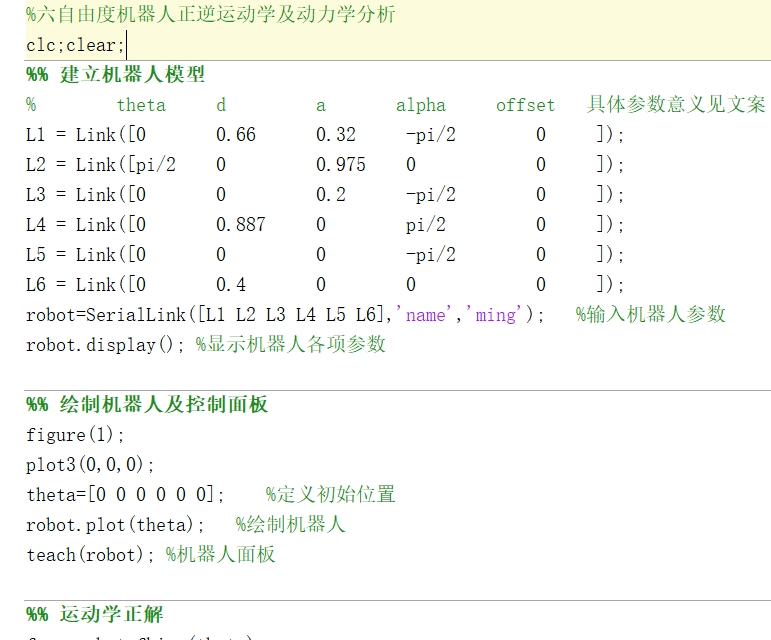
六自由度机械臂建模仿真(matlab程序),有控制面板,代码可流畅运行1、机器人运动学正逆解、动力学建模仿真与轨迹规划,雅克比矩阵求解2、蒙特卡洛采样画出末端执行器工作空间3、基于时间最优的改进粒子群优化算法机械臂轨迹规划设计在机器人领域,六自由度机械臂因其高度的灵活性和广泛的应用场景,一直是研究的热门对象。今天咱就聊聊如何通过Matlab来实现六自由度机械臂的建模仿真,还带着个控制面板,代码跑起
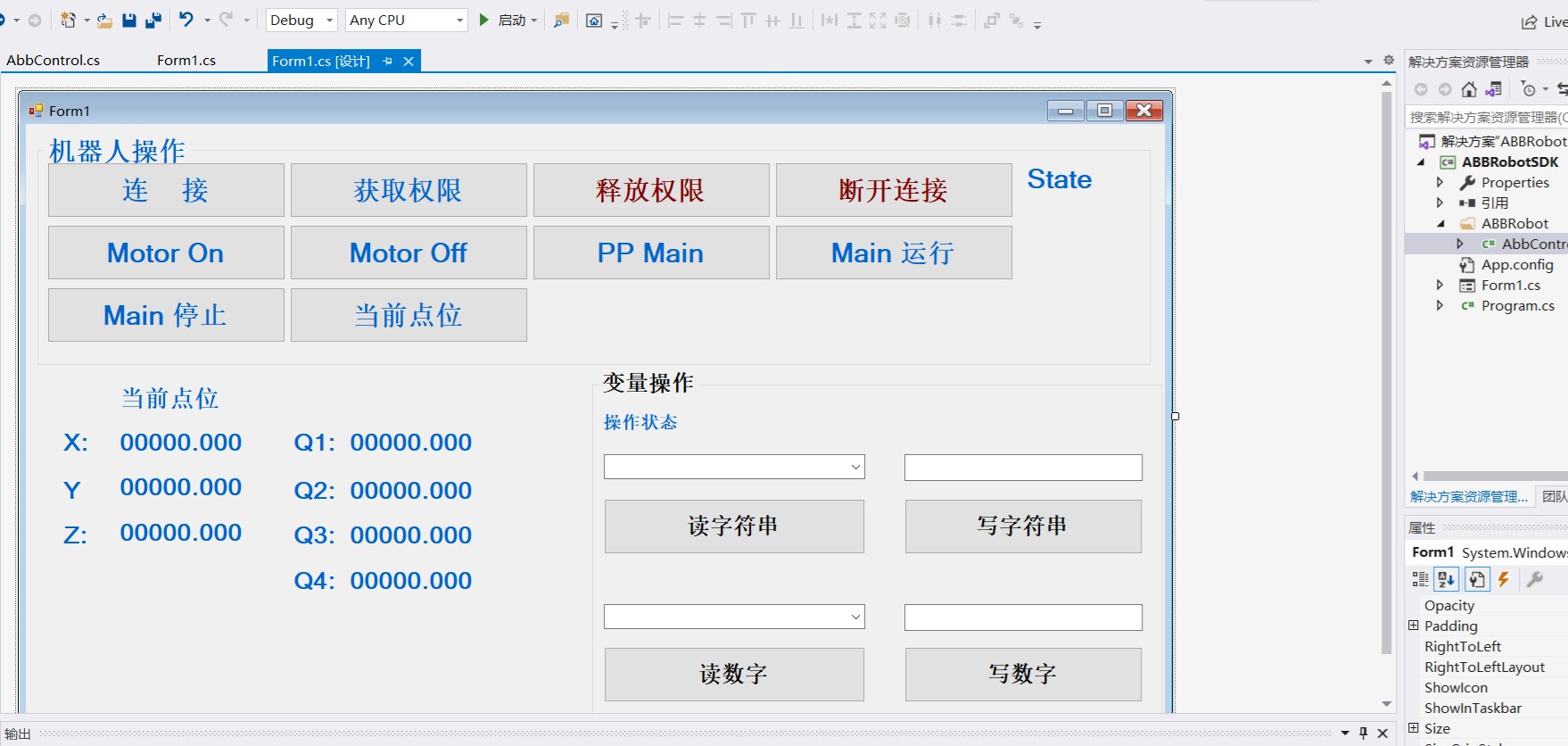
通过这种方式,利用C#结合自定义的ABB机器人类,就能轻松实现对ABB机器人点位信息的读取和写入,为ABB机器人的二次开发提供了有力支持,满足各种复杂的自动化任务需求。而二次开发能让ABB机器人更好地适配特定业务场景,今天咱们就来聊聊如何用C#实现对ABB机器人数据的读取和写入,特别是点位信息的获取与写入。首先,咱自己写了个ABB机器人类,这个类涵盖了机器人常规操作功能,为二次开发奠定了良好基础。
车辆碰撞预警,采用ttc制动和计算安全距离的预警,车辆预警模型,绿色为低危险度,棕色为中危险度,红色为高危险度,黑色为制动无法避免,需要换道转向等以避免碰撞,prescan和matlab联合。车辆碰撞预警,采用ttc制动和计算安全距离的预警,车辆预警模型,绿色为低危险度,棕色为中危险度,红色为高危险度,黑色为制动无法避免,需要换道转向等以避免碰撞,prescan和matlab联合。有意思的是Pre
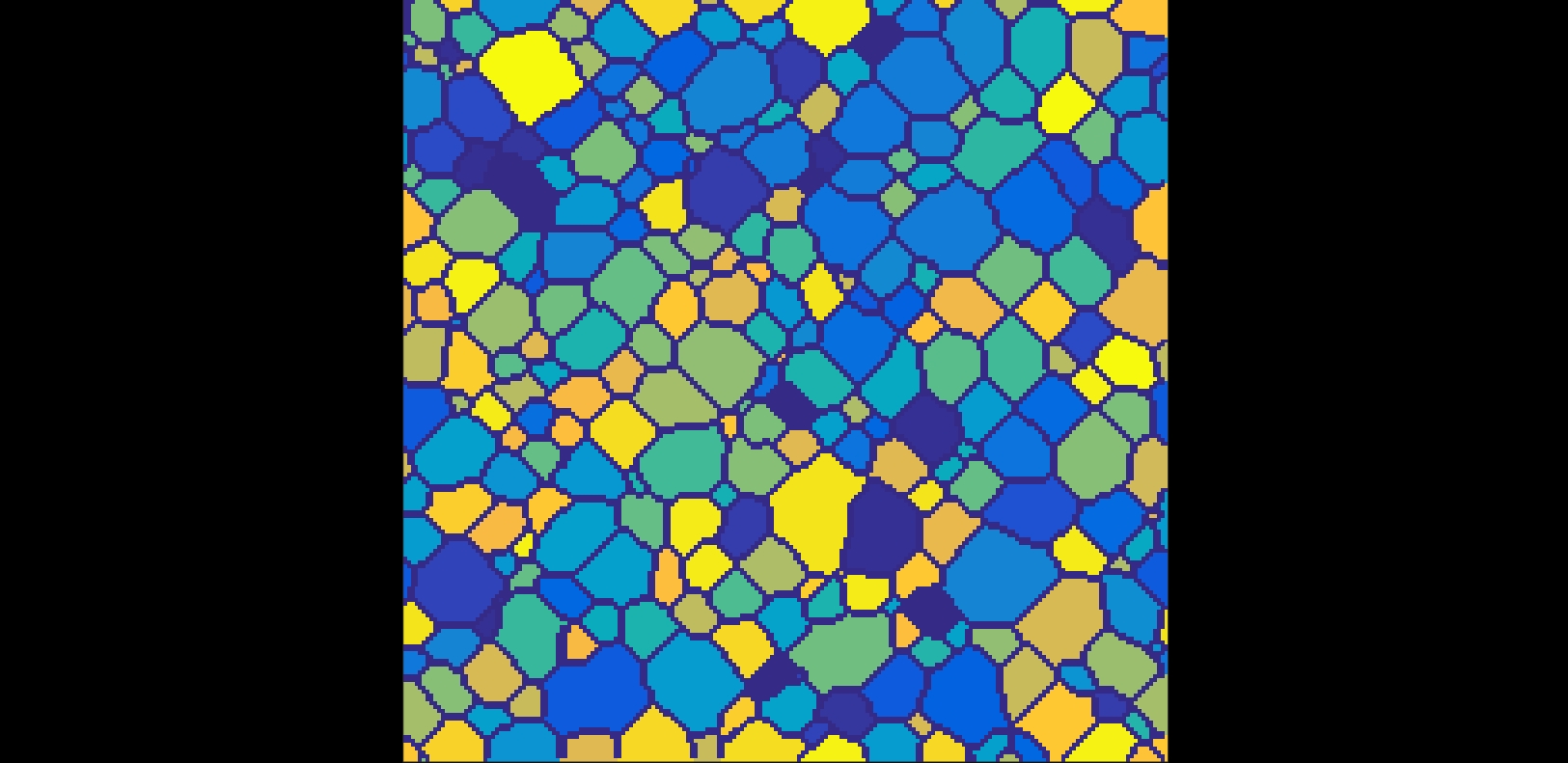
CA法模拟动态再结晶,晶粒正常长大,利用元胞自动机生成拓扑晶粒模型,参数可调。元胞胞自动机模拟动态再结晶母相晶粒生成。本程序基于曲率驱动机制以及热激活机制,matlab编写,本程序模拟奥氏体晶粒正常长大过程。程序均有注释,仅作学习交流使用这段程序主要是用于生成晶粒取向随机分布的均匀化晶粒组织。程序的主要流程如下:1. 用户输入元胞空间大小(Nx和Ny)、形核点数目(numnucl)和随机数种子(m
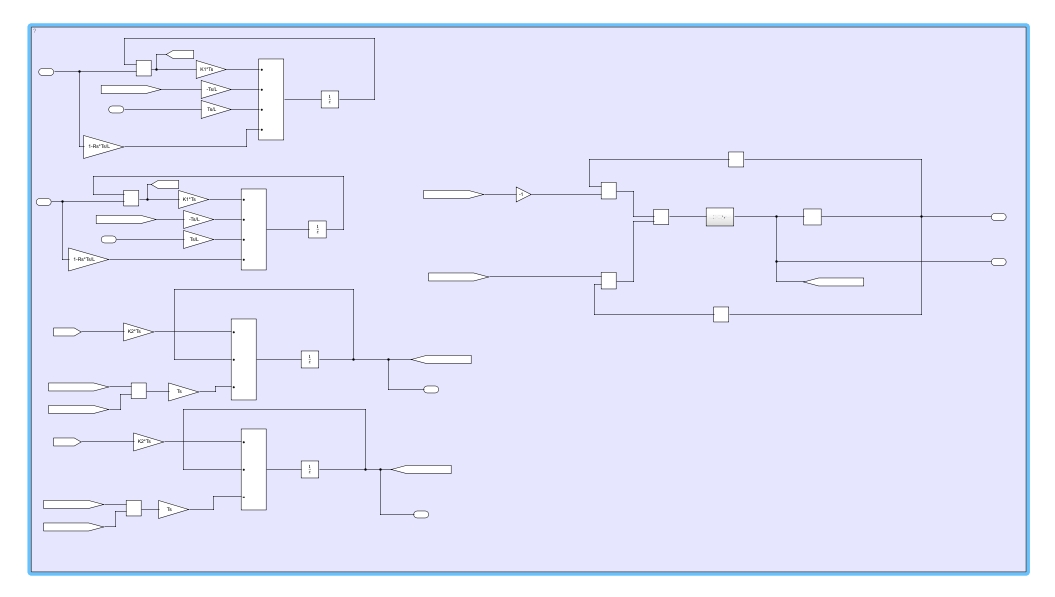
该模型采用离散化的龙贝格观测器进行无传感器控制其利用 PMSM 数学模型构造观测器模型,根据输出的偏差反馈信号来进行PLL得到速度和角度。当观测的电流实现与实际电流跟随时,可以从观测的反电势计算得到电机的转子位置信息,形成跟踪闭环估计。龙伯格观测器采用线性控制策略代替了 SMO 的变结构控制,有效避免了系统抖振,具有动态响快、估算精度高的优点。在电机控制领域,无传感器控制技术一直是个热门话题。今天
该方案已在 5000+ 台现场设备稳定运行超过两年,最长连续升级 8000 次无异常,可直接复制到 Zynq-7000、Kintex-7、Artix-100T 等平台,为后续 OTA、边缘计算、远程运维奠定坚实基础。4) 该文件即为“带升级逻辑的 FPGA 映像”,首次需通过 JTAG 烧入,之后即可远程升级。▲100 M 固定速率。升级qspi flash,无需增加外部电路,无需内存,方便实用,

信捷PLC在分散式控制中的应用,体现了PLC技术的灵活性和高效性。通过模块化编程框架和丰富的功能模块,信捷PLC能够轻松应对复杂的控制需求。无论是伺服电机的运动控制,还是气缸的手动控制,亦或是报警功能的实现,信捷PLC都能提供高效、可靠的解决方案。总之,信捷PLC是分散式控制的理想选择,其模块化编程框架和丰富的功能模块,为工业自动化提供了强大的技术支持。

实测某风电场数据,最优配置出现在电池132MWh+电容98MWh时,比经验配置省了18%成本。凌晨三点的风电监控室里,老王盯着屏幕上的功率波动曲线直嘬牙花子。要解决这个问题,遗传算法或许是个路子——今天就带大家用MATLAB整点实在的。咱们把电池和超级电容器捆一块用,前者负责平抑低频波动,后者应对高频分量。核心问题是怎么找到性价比最高的容量组合,这时候遗传算法就派上用场了。当配置超过限额时,惩罚项

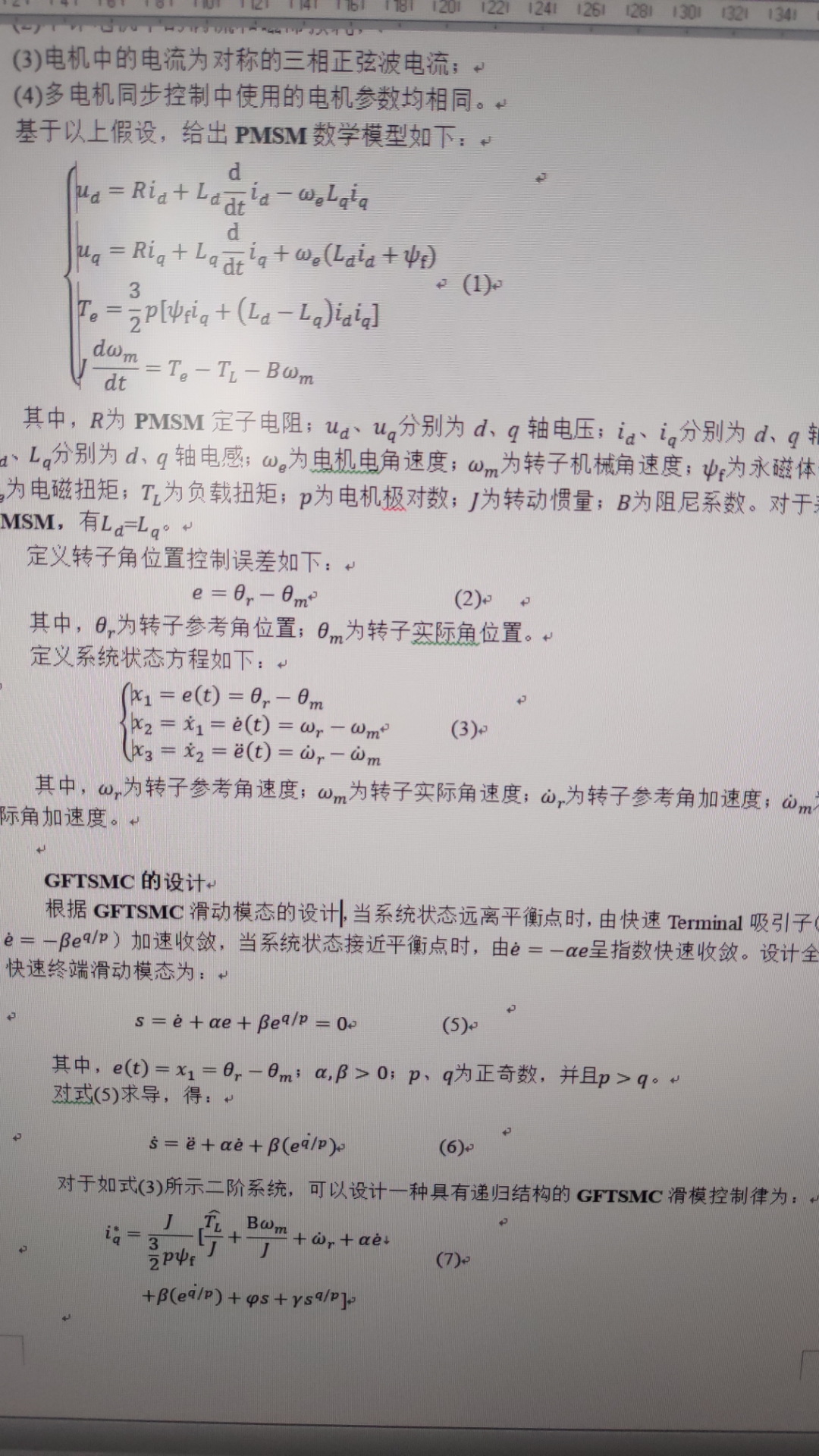
对比隔壁PI控制,同样的负载突变场景,GFTSMC的恢复时间能缩短60%,就是CPU占用率高8%左右,鱼和熊掌自己掂量吧。但是转存的过程中,有些模块会转存失败,需要从新转存版本的simulnik里的library里找到同样的模块,把转存失败的替换掉。但是转存的过程中,有些模块会转存失败,需要从新转存版本的simulnik里的library里找到同样的模块,把转存失败的替换掉。1.该模型是基于202
该方案已在 5000+ 台现场设备稳定运行超过两年,最长连续升级 8000 次无异常,可直接复制到 Zynq-7000、Kintex-7、Artix-100T 等平台,为后续 OTA、边缘计算、远程运维奠定坚实基础。4) 该文件即为“带升级逻辑的 FPGA 映像”,首次需通过 JTAG 烧入,之后即可远程升级。▲100 M 固定速率。升级qspi flash,无需增加外部电路,无需内存,方便实用,
