
写文章




- @nwaysir
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务

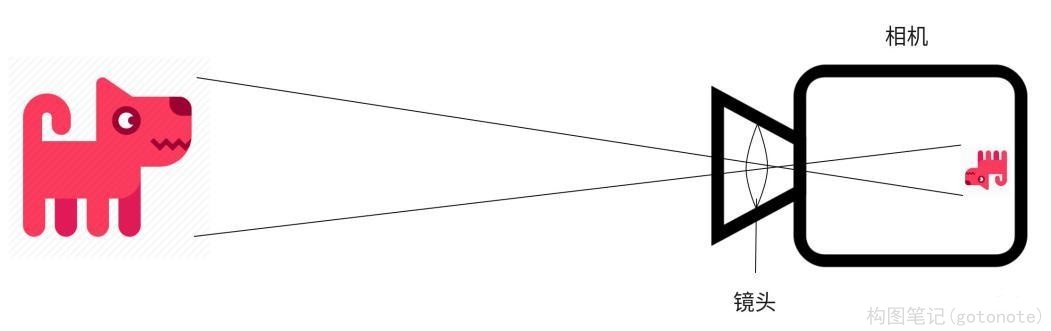
2.1.1 摄像头
摄像头是目前自动驾驶车中应用和研究最广泛的传感器,其采集图像的过程最接近人类视觉系统。基于图像的物体检测和识别技术已经相当成熟,随着近几年深度学习的发展,基于深度学习的视觉感知算法已大量应用于实际生活和生产中,在某些任务上甚至已经超越人类水平。在自动驾驶车上,一般会安装多个摄像头,兼顾不同的视角和任务
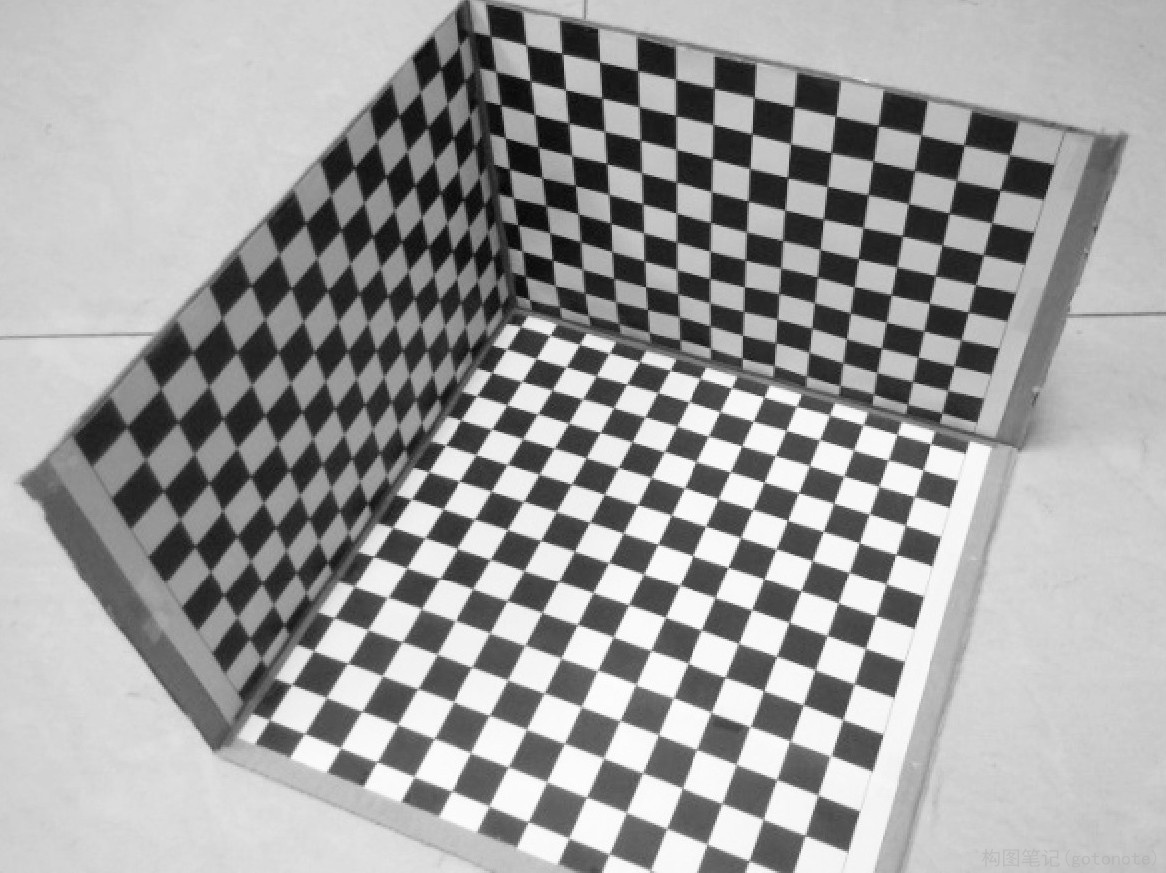
2.4.1.2 张正友相机标定法
传统标定法的标定板是需要三维的,需要非常精确,这很难制作,而张正友教授提出的方法介于传统标定法和自标定法之间,但克服了传统标定法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。理论上镜头的畸变包括径向畸变和切向畸变,切向畸变影响较小,通常只考虑径向畸变,而且在径向畸变的求解中,仅考虑了起主导的二元泰勒级数展开的前两个系数。矩阵中未知的5个参数。相机标定指建立相机图像像素位置与场景点
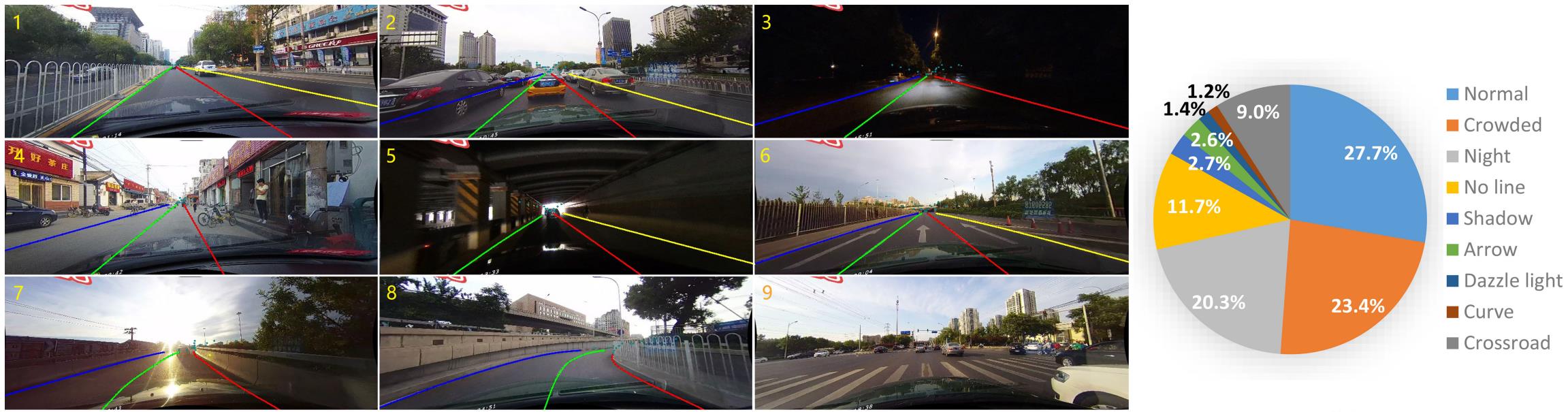
3.1.1 车道线检测
车道线检测是一种环境感知应用,其目的是通过车载相机或激光雷达来检测车道线。近年来,随着计算机视觉的应用发展和落地,车道线检测任务也获得了广泛关注,出现一系列的车道线检测方法。车道检测在自动驾驶系统中扮演着重要的角色,特别是在高级辅助驾驶系统(ADAS)中。

到底了