




- @nLsUCWFJR
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
折腾完这套系统,最大的收获是明白仿真和现实的差距——摄像头延迟、机械臂传动误差、光照变化,随便哪个都能让完美仿真相形见绌。MATLAB机器人仿真机械臂视觉控制运动仿真,根据设定的跟踪目标,通过读取摄像头跟踪运动目标,利用逆解实现机械臂跟随目标运动的路径规划仿真,实现视觉控制机械臂运动仿真。MATLAB机器人仿真机械臂视觉控制运动仿真,根据设定的跟踪目标,通过读取摄像头跟踪运动目标,利用逆解实现机械

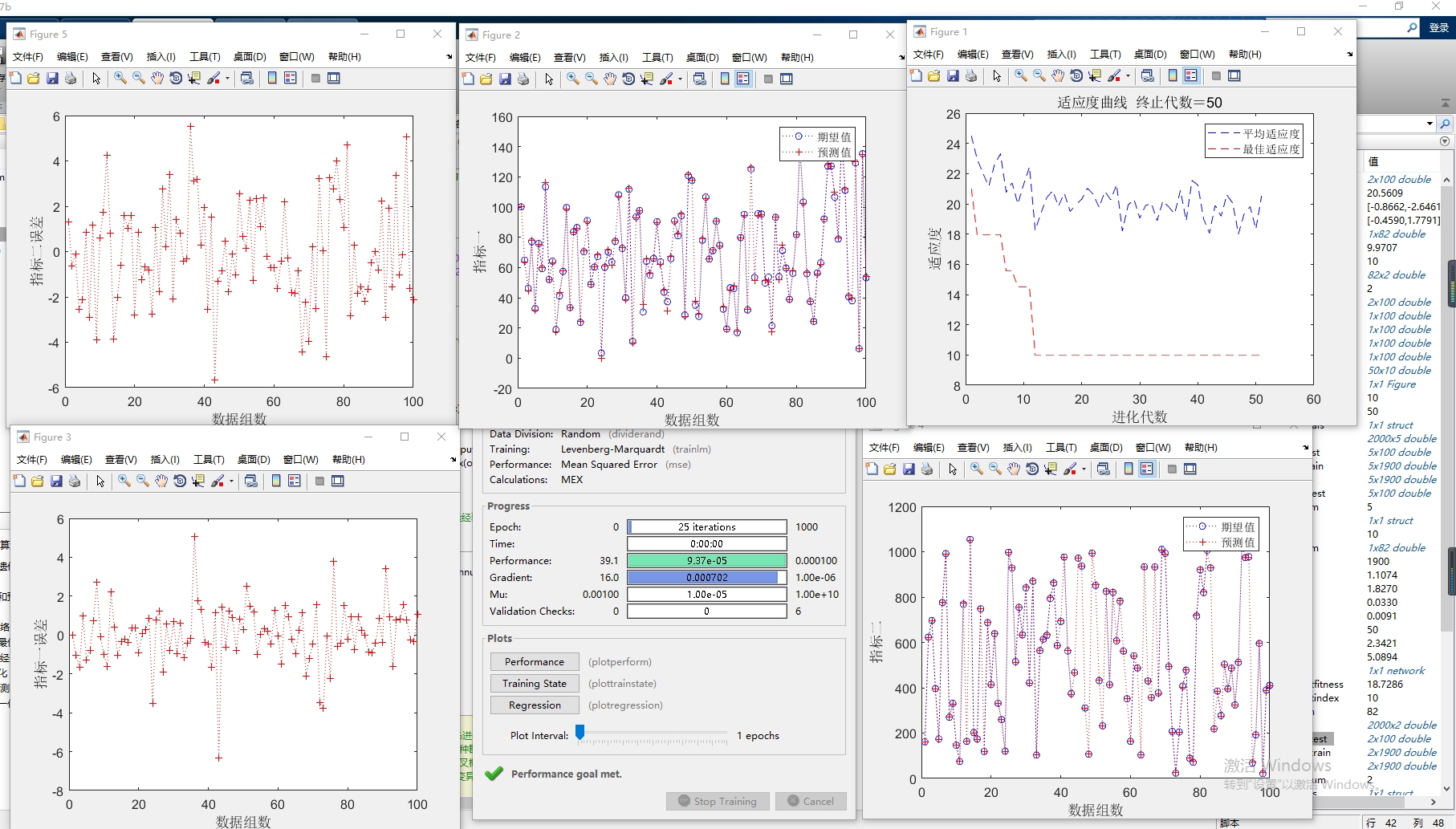
matlab的基于遗传算法优化bp神经网络多输入多输出预测模型,有代码和EXCEL数据参考,精度还可以,直接运行即可,换数据OK。这个程序是一个基于遗传算法优化的BP神经网络多输入两输出模型。下面我将对程序进行详细分析。首先,程序读取了一个名为“数据.xlsx”的Excel文件,其中包含了输入数据和输出数据。输入数据存储在名为“input”的矩阵中,输出数据存储在名为“output”的矩阵中。接下
参考文献方面,王老2018年那篇《多体动力学在座椅设计中的应用》给了关键理论支撑,而张工的博士论文第五章提到的耦合振动分析方法,帮我们少走了至少三个月弯路。最后说个冷知识:5自由度模型计算出的最佳阻尼比,在实际装车时反而要下调15%左右。因为仿真时没考虑的真皮座椅的蠕变特性,会偷偷吃掉部分振动能量——所以说,搞仿真不接地气,分分钟被现实打脸啊!详情请csdn搜索博客:3、5自由度座椅悬架,以及5自
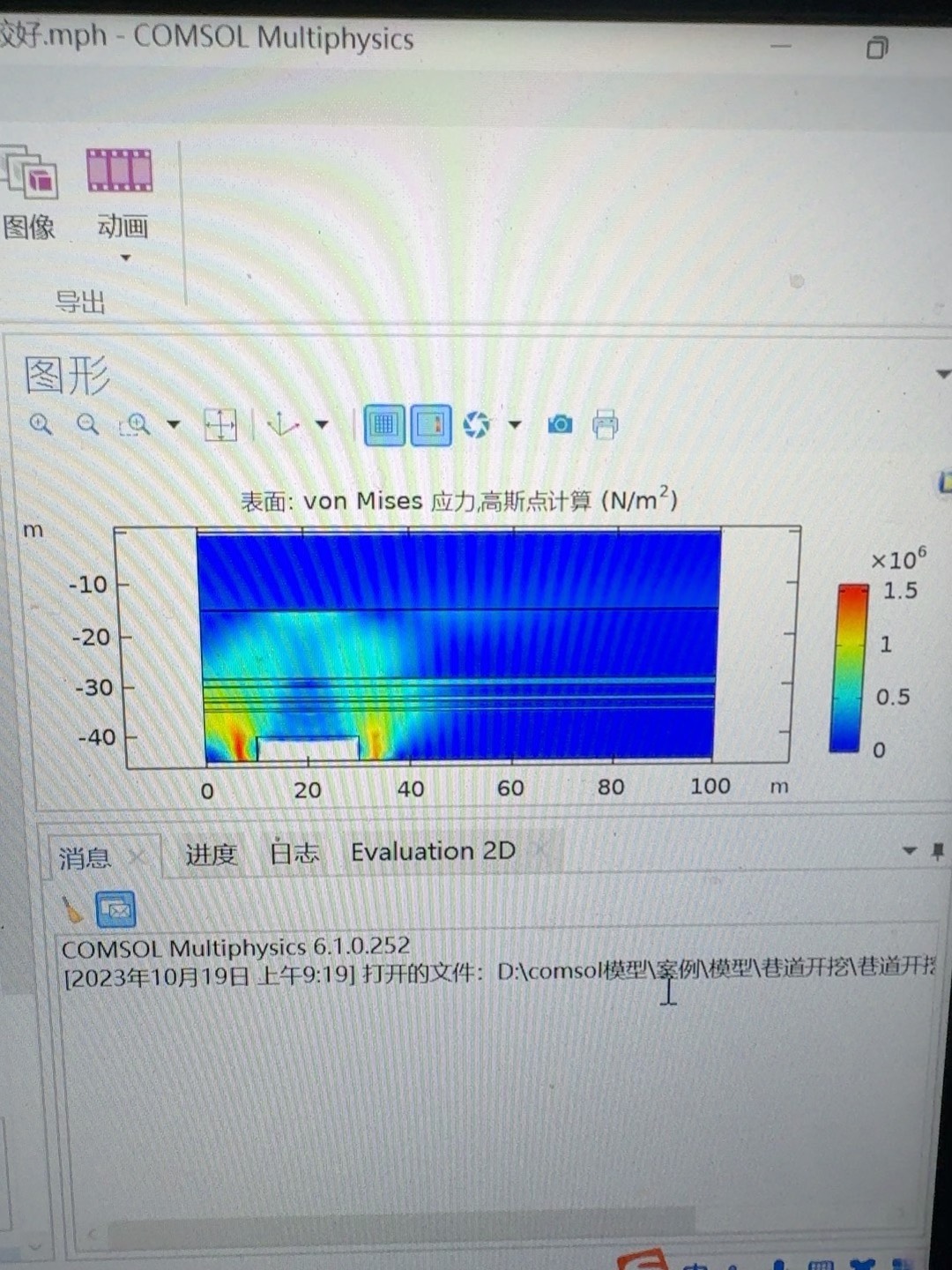
数值模拟就像搭积木,每次改进都能发现新的应力传递路径,这大概就是岩土工程的魅力所在吧。注意节点编号是二维转一维的常见操作,这里用了网格坐标转索引的小技巧。但如果是狭长型巷道,应力会向两帮集中。巷道开挖的数值模拟总让我想起小时候玩沙坑的感觉——挖掉一块区域,周围结构就会产生连锁反应。今天咱们用Python整一个二维巷道开挖的模型,看看土体应力怎么重新分布。这里用了个取巧的方法:把开挖区域弹性模量降到
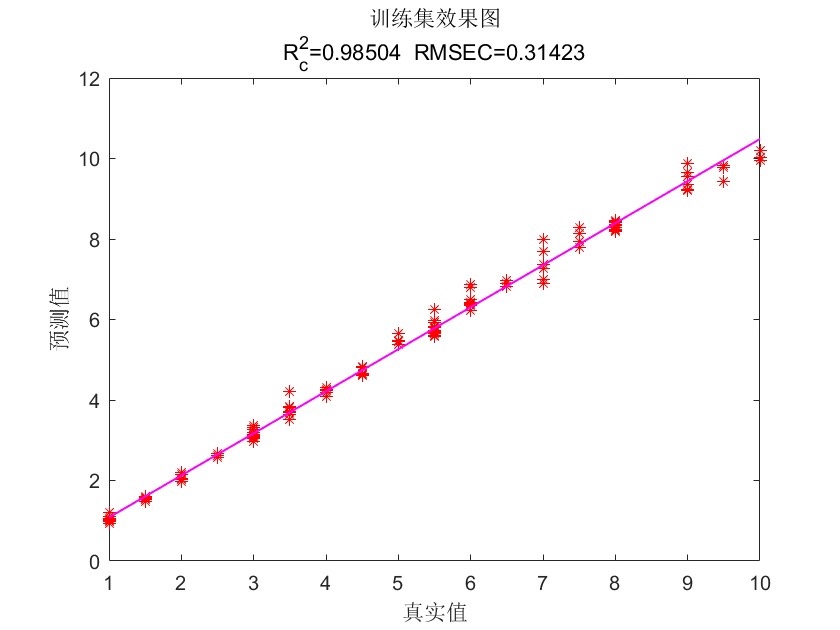
(Matlab)基于贝叶斯优化卷积双向长短期记忆网络(CNN-BiLSTM)回归预测,BO-CNN-BiLSTM/Bayes-CNN-BiLSTM多输入单输出模型。1.优化参数为:学习率,隐含层节点,正则化参数。2.评价指标包括:R2、MAE、MSE、RMSE和MAPE等,方便学习和替换数据。3.运行环境matlab2020b及以上。4.所有程序经过验证,保证原始程序运行。最近在折腾时序预测任务,
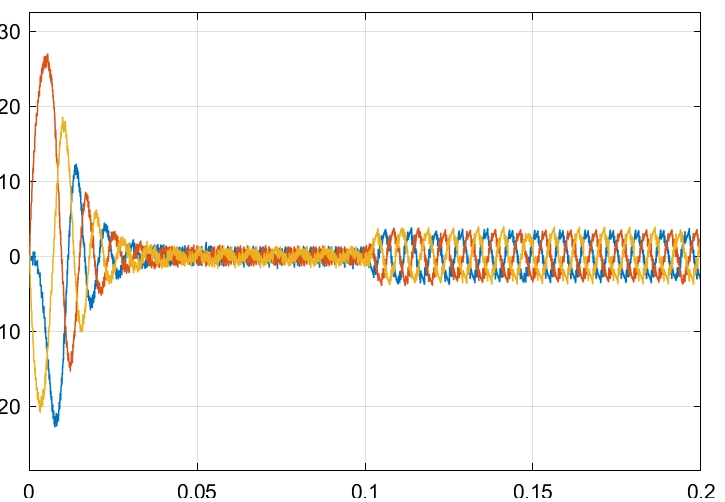
该模型采用模型预测控制进行PMSM速度控制,由于预测控制理论在近些年来得到了快速发展并且在工业控制中应用越来越广泛算法应用到永磁同步电机的控制中,充分利用其滚动优化和反馈校正的特点,使控制器表现出较好的鲁棒性,同时它具有结构简单、易于实现、对过程模型要求低等优点,因而在PMSM控制领域取得了显著的控制效果。特别是车间里那些需要快速响应又怕参数飘移的场合,传统的PI控制器经常得跪着调参,而MPC愣是
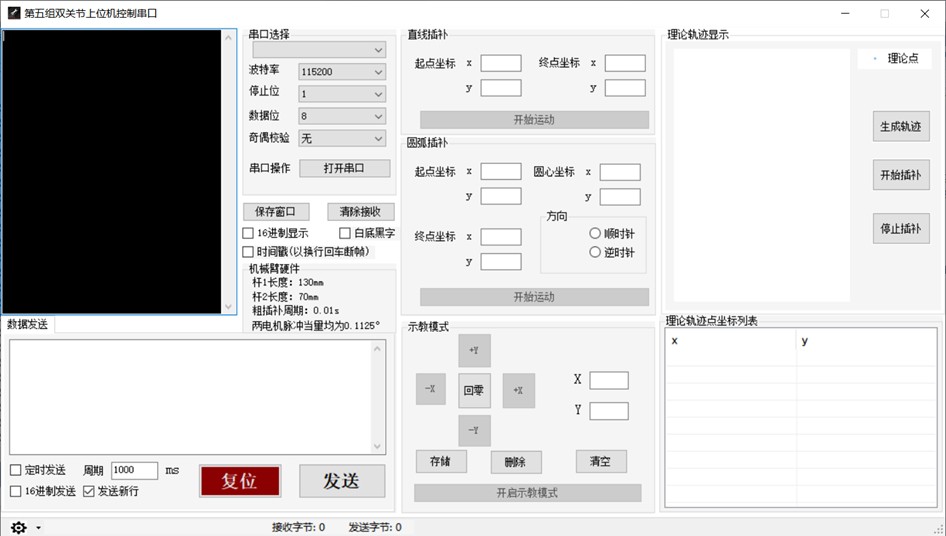
最近在搞一个基于C#的上位机程序,主要任务是控制电机转动,实现直线插补和圆弧插补。听起来挺高大上的,其实说白了就是让电机按照我们设定的路径走,别跑偏了。总的来说,控制电机转动、直线插补和圆弧插补的实现并不复杂,关键是要理解背后的数学原理,然后通过代码实现。这里的关键是脉冲信号的发送频率和数量,直接决定了电机的转速和位置。这段代码计算了每一步的角度增量,然后根据角度计算当前坐标,逐步移动到目标位置。
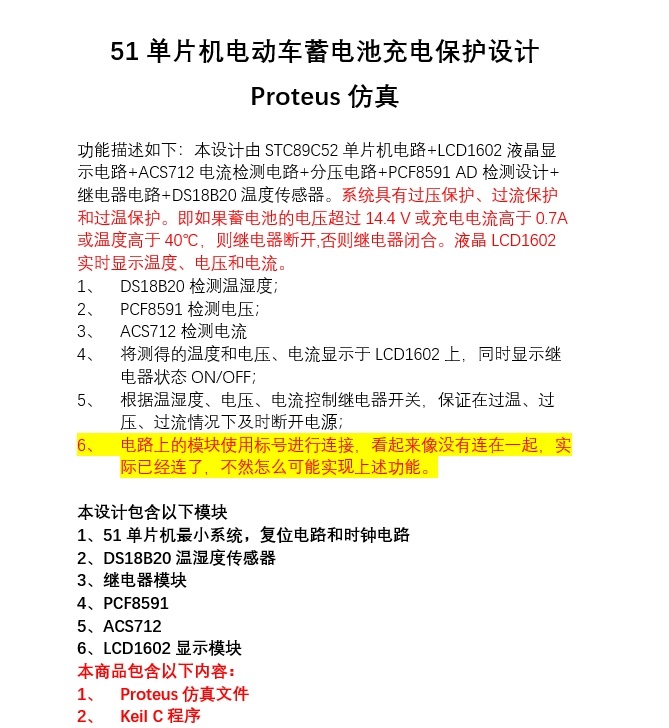
过压保护:当蓄电池电压超过14V时,及时断开充电电路。过流保护:当充电电流超过0.7A时,及时断开充电电路。过温保护:当蓄电池温度超过40℃时,及时断开充电电路。实时显示:通过LCD1602实时显示蓄电池的电压、电流和温度。继电器控制:根据传感器检测的结果,控制继电器的状态。本设计通过STC89C52单片机的控制,结合多种传感器和保护电路,实现了蓄电池的全面保护。系统设计灵活,能够根据不同的蓄电池
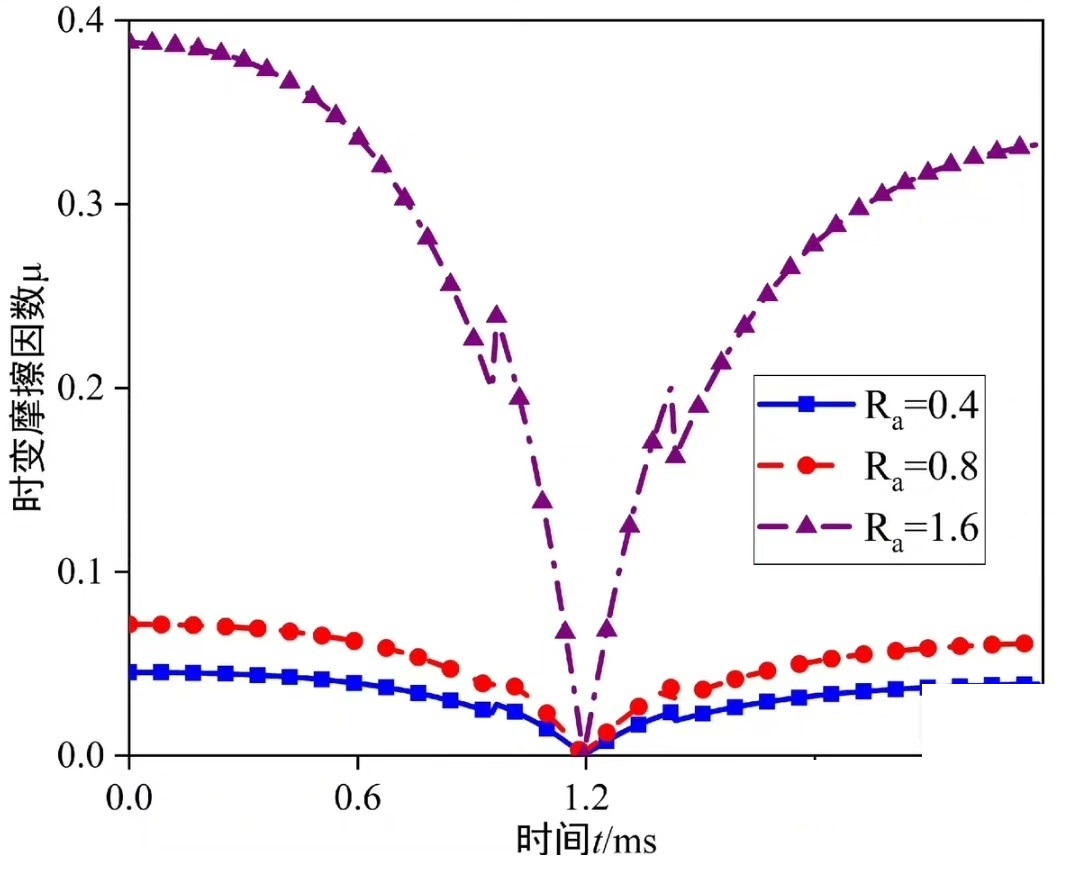
从结果曲面能明显看出摩擦系数和裂纹深度的非线性耦合效应——当两者同时增大时,刚度会出现断崖式下跌,这个现象和我们在齿轮故障实验中观测到的"刚度跳水"现象吻合。这段代码的精髓在于多物理场的耦合处理。裂纹影响用了高斯衰减函数,0.1*F这个经验系数来自我们实验室的疲劳试验数据。完整代码已打包成Matlab Live Script,包含动态调节参数的交互界面,需要的小伙伴可以到Github仓库自取。传统
红外光伏缺陷目标检测模型,YOLOv8模型基于红外光伏缺陷目标检测数据集训练,做了必要的数据增强处理,以达到缺陷类别间的平衡可检测大面积热斑,单一热斑,二极管短路和异常低温四类缺陷测试集指标如图所示在光伏领域,及时准确地检测出光伏组件的缺陷至关重要。今天就来和大家分享一下基于YOLOv8模型构建红外光伏缺陷目标检测模型的过程。
